
Page 17 - 《应用声学》2021年第6期
P. 17
第 40 卷 第 6 期 刘帅京等: 稳健声线扰动特征用于浅海小目标定位 813
遮蔽效应会造成该声线的到达波信号出现 “阴影”, (5) 目标位置确定:从定位模糊图中的亮点位
对应了声压敏感核在第一菲涅耳区内的负值,对于 置推断目标位置r t = max Ψ (r )。
′
′
r ′
没有照射到目标上的声线,接收信号的扰动非常微
弱,可忽略不计,因此可以通过对发生明显扰动的声
Ψ(r')=0
线 (或未发生扰动的声线) 进行几何交汇实现目标
定位。 m=0
ኄ m ܦጳᄊ
ᄱࠫࣨϙԫӑdA m ⊳A m
T
SA RA
ա
dA m m/m⇁
> Th m ⋆
A m
௧
图 3 探测系统示意图
Ψ(r')=Ψ m (r')+Ψ(rϕ)
Fig. 3 The illustration of the detection system
实际的海洋环境中,高频条件下的接收信号
ա
扰动受信道自身起伏的影响较大,但在一定的条 m/M ?
件下,某些路径的扰动受信道的影响较小,将这 ௧
些受信道影响较小的声线称为稳健声线,本文提 ॆʷӑܫေ
出的基于稳健声线扰动特征的定位方法就是通过 ४҂ Ψ ∋(rϕ)
筛选这些稳健声线中的扰动声线进行目标定位的,
r t =max Ψ ∋(r')
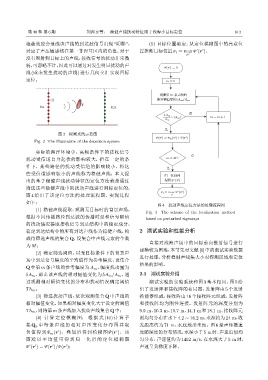
图 4 给出了该定位方法的处理流程图,实现过程 rϕ
如下:
图 4 扰动声线定位方法的处理流程图
(1) 稳健声线提取:观测无目标时的背景声场,
Fig. 4 The scheme of the localization method
根据不同传播路径到达波的传播时延和信号幅值 based on perturbed eigenrays
的扰动情况提取接收信号到达结构中的稳定成分,
稳定到达结构中的所有到达声线作为稳健声线,构 2 湖试实验和性能分析
成待筛选声线的集合 Q,设集合中声线元素的个数
直接对浅海声场中的目标前向散射信号进行
为M;
建模较为困难,本节先对文献[6]中的湖试实验数据
(2) 确定筛选阈值:以无目标条件下的背景声
进行处理,分析稳健声线集大小对探测区域和定位
场中到达信号幅度的平均值作为参考幅度,设集合
结果的影响。
Q 中第 m 条声线的参考幅度为 A m ,幅度扰动量为
δA m ,那么该声线的相对幅值变化为 δA m /A m ,通 2.1 湖试实验介绍
过观测相对幅值变化的分布和扰动情况确定阈值 湖试实验的实验系统和图 3 基本相同,图 5 给
Th m ; 出了发射阵和接收阵的布局图,发射阵由 5 个发射
(3) 筛选扰动声线:依次观测集合 Q 中声线的 换能器组成,接收阵由 16 个接收阵元组成,发射阵
相对幅值变化,如果相对幅度变化大于设定的阈值 和接收阵均为刚性连接。发射阵元的深度分别为
Th m ,则将第m条声线加入扰动声线集合Q中; 9.9 m、10.3 m、10.7 m、14.1 m 和 18.1 m,接收阵元
(4) 计 算 定 位 模 糊 图: 根 据 式 (10) 计 算 子 则均匀分布在水下4.2 ∼ 16.2 m,水深约为24 m,收
集 Q p 中每条声线的相对声压变化分布图并取 发距离约为 71 m,水底地形未知。图 6 是声传播速
负值得到 Ψ m (r ),叠加后得到模糊图 Ψ(r ),该 度随深度的分布情况,水深小于5 m时,声速近似均
′
′
图 除 以 平 均 值 可 得 到 归 一 化 后 的 定 位 模 糊 图 匀分布,声速值约为 1452 m/s,在水深大于 5 m 时,
¯
Ψ (r ) = Ψ(r )/Ψ(r ); 声速呈负梯度下降。
′
′
′
′