
Page 21 - 《应用声学》2021年第6期
P. 21
第 40 卷 第 6 期 刘帅京等: 稳健声线扰动特征用于浅海小目标定位 817
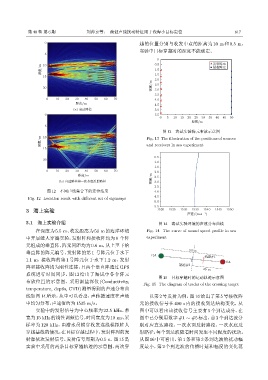
0 越的位置分别与收发中点的距离为 10 m 和 0.5 m,
实验中目标穿越时的深度不能确定。
5
0 ԧ࠱Ћ
ງए/m 10 0.5 ଌஆЋ
1.0
15 1.5
2.0
ງए/m 2.5
20 3.0
3.5
0 10 20 30 40 50 60 70 4.0
ᡰሏ/m
4.5
(a) ᄰय़ 5.0
0 5.5
0 5 10 15 20 25 30 35 40 45 50
ᡰሏ/m
5
图 13 海试实验阵元布放示意图
ງए/m 10 Fig. 13 The illustration of the positions of sources
and receivers in sea experiment
15
0.5
20
1.0
1.5
0 10 20 30 40 50 60 70 2.0
ງए/m
ᡰሏ/m 2.5
(b) ᄰय़֗ʷඵअԦ࠱य़ 3.0
3.5
图 12 不同声线集合下的定位结果 4.0
4.5
Fig. 12 Location result with different set of eigenrays
5.0
5.5
3 海上实验 1520 1525 1530 1535 1540 1545 1550
ܦᤴ/(mSs -1 )
3.1 海上实验介绍 图 14 海试实验环境的声速分布曲线
在深度为 5.5 m、收发距离为 50 m 的海洋环境 Fig. 14 The curve of sound speed profile in sea
中开展蛙人穿越实验,发射阵和接收阵均为 8 个阵 experiment
元组成的垂直阵,阵元间距均为 0.6 m,从上至下给
垂直阵的阵元编号,发射阵的第 1 号阵元位于水下 50 m
RA ᢾᤜ#1
1.1 m,接收阵的第 1 号阵元位于水下 1.2 m,发射
SA
ᢾᤜ#2
阵和接收阵均为刚性连接,且两个垂直阵通过 GPS
25 m
系统进行时间同步,图 13 给出了海试中各个阵元
图 15 目标穿越时的运动轨迹示意图
布放位置的示意图。采用温盐深仪 (Conductivity,
Fig. 15 The diagram of tracks of the crossing target
temperature, depth, CTD)测量得到的声速分布曲
线如图 14 所示,从中可以看出,声传播速度在声场 以第 2 号发射为例,图 16 给出了第 5 号接收阵
中均匀分布,声速值约为1535 m/s。 元的接收信号在 400 s 内的接收到达结构变化,从
实验中的发射信号为中心频率为 22.5 kHz、带 图中可以看出该接收信号主要有 5 个到达成分,在
宽为15 kHz的线性调频信号,时间宽度为10 ms,采 图中已分别用数字 #1 ∼ #5 标出,前 3 个到达波分
样率为 120 kHz,由潜水员横穿收发连线模拟蛙人 别对应直达路径、一次水面反射路径、一次水底反
穿越基线的情况,在目标穿越过程中,发射阵列的发 射路径,每个到达波随着时间发生不同程度的扰动。
射源依次发射信号,发射信号周期为 0.5 s。图15是 从图 16 中可看出,第 1 条和第 3 条到达波的扰动幅
实验中采用的两条目标穿越轨迹的示意图,两次穿 度最小,第 2 个到达波的传播时延和幅度的变化范