
Page 23 - 《应用声学》2021年第6期
P. 23
第 40 卷 第 6 期 刘帅京等: 稳健声线扰动特征用于浅海小目标定位 819
的分布变得不均匀,此时的探测范围主要依赖两个 非目标引起的扰动尖峰,如图 20(b) 中用黑框标出
垂直阵的阵元分布与海底构成的区域,靠近海面的 的部分,这一方面可能来自于动态海洋环境自身引
部分变为探测盲区,因此可以通过改变第 1 号阵元 起的接收信号变化,另一方面可能来自于传播时延
与海面的距离调整探测区域。 估计值与实际接收信号结构的误差,因此这里只对
3.3 筛选扰动声线 同一时刻发生扰动的声线进行筛选,以排除环境等
影响因素,多条声线同时发生扰动的时刻则代表了
以图15中的目标运动轨迹#1为例介绍筛选扰
目标穿越收发连线的时刻。
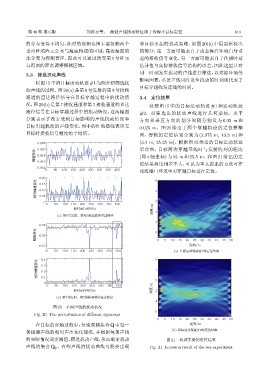
动声线的过程。图20(a)是第8号发射的第8号接收
通道的直达路径信号在目标穿越过程中的扰动情 3.4 定位结果
况,图20(b)是第 7 接收通道和第 7 接收通道的直达 处理图 15 中的目标运动轨迹 #1 和运动轨迹
路径信号在目标穿越过程中的扰动情况,这两幅图 #2,对筛选出的扰动声线进行几何叠加,水平
分别表示了没有受到目标影响的声线扰动情况和 方向和垂直方向的划分间隔分别设为 0.05 m 和
目标引起扰动的声线变化,图中的红色横线表示无 0.025 m。图 21 给出了两个穿越轨迹的定位模糊
目标时接收信号幅度的平均值。 图,得到的定位结果分别为 (3.975 m, 13.3 m) 和
0.022 (3.4 m, 25.25 m)。根据图 15 给出的目标运动轨迹
0.020 示意图,目标两次穿越基线时与发射阵列的距离
ࣨϙԫӑ 0.018 (即 x 轴坐标) 为 15 m 和 25.5 m,和图 21 给出的定
0.016
位结果相比相差不大,可认为本文提出的方法可在
0.014
0 50 100 150 200 250 300 350 400
浅海港口环境中对穿越目标进行定位。
0.20 0
ᄱࠫࣨϙԫӑ 0.15 1
0.10
0.05
0 2
0 50 100 150 200 250 300 350 400
ᄱࠫᤂᛡᫎ/s ງए/m 3
(a) ኄ8Ղԧ࠱njኄ8ଌஆᤰ᥋ᄊᄰय़
4
0.25
ࣨϙԫӑ 0.20 5 0 5 10 15 20 25 30 35 40 45 50
0.15 ᡰሏ/m
0 50 100 150 200 250 300 350 400 0 (a) ᄬಖᤂүᢾᤜ#1ᄊࠀͯፇ౧
0.4
ᄱࠫࣨϙԫӑ 0.3 1
0.2
0.1
2
0
0 50 100 150 200 250 300 350 400 ງए/m
ᄱࠫᤂᛡᫎ/s 3
(b) ኄ7Ղԧ࠱njኄ7ଌஆᤰ᥋ᄊᄰय़
4
图 20 不同声线的扰动情况
5
Fig. 20 The perturbation of different eigenrays
0 5 10 15 20 25 30 35 40 45 50
在目标的穿越过程中,分别观测集合Q 中每一 ᡰሏ/m
条稳健声线的相对声压变化情况,并根据每条声线 (b) ᄬಖᤂүᢾᤜ#2ᄊࠀͯፇ౧
的实际情况设定阈值,筛选扰动声线,从而确定扰动 图 21 海试实验的定位结果
声线的集合 Q p 。有些声线的扰动曲线可能会出现 Fig. 21 Location result of the sea experiment