
Page 19 - 《应用声学》2021年第6期
P. 19
第 40 卷 第 6 期 刘帅京等: 稳健声线扰动特征用于浅海小目标定位 815
0.15
0.3 #2
#1
0.10
0.2 #3
#4
0.1 0.05 * #5
ࣨए/V 0 ࣨए/V 0
-0.1
-0.05
-0.2
-0.10
-0.3
-0.15
0 5 10 15 20 25 30 35 40 45 50 0 5 10 15 20 25 30 35 40 45 50
ᫎ/ms ᫎ/ms
(a) ҂ηՂฉॎ (b) ҂ηՂᄊӜᦡฉፇ౧
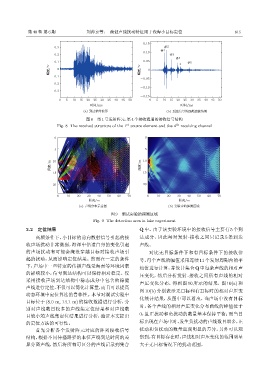
图 8 第 1 号发射阵元、第 4 个接收通道的接收信号结构
Fig. 8 The received structure of the 1 st source element and the 4 th receiving channel
0 0
5 5
ງए/m 10 ງए/m 10
15 15
20 20
0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70
ᡰሏ/m ᡰሏ/m
(a) ܦጳѬ࣋ᇨਓڏ (b) ࠄᰎ˗ᄊଊӝ۫
图 9 湖试实验的探测区域
Fig. 9 The detection area in lake experiment
2.2 定位结果 Q 中。由于该实验环境中的接收信号主要有 5 个到
高频条件下,小目标的前向散射信号引起的接 达成分,因此每对发射 -接收之间只记录 5 条到达
收声场扰动非常微弱,海洋中信道自身的变化引起 声线。
的声场扰动有可能会淹没穿越目标对接收声场引 对比无目标条件下和有目标条件下的接收信
起的扰动,从而影响定位结果。然而在一定的条件 号,每个声线的幅值采用连续 11个发射周期内的平
下,声场中一些特定的传播声线受海面等环境因素 均值进行计算,并统计集合 Q 中每条声线的相对声
的影响较小,信号到达结构可以保持相对稳定。仅
压变化,然后分析发射 -接收之间所有声线的相对
采用接收声场到达结构中稳态成分中包含的稳健
声压变化分布,得到图 10 所示的结果,图 10(a) 和
声线进行定位,不仅可以简化计算量,而且可以提高
图 10(b) 分别表示无目标和有目标时的相对声压变
动态环境中定位算法的鲁棒性。本节对湖试实验中
化统计结果,从图中可以看出,当声场中没有目标
目标位于 (8.0 m, 14.1 m) 的接收数据进行分析,分
时,各个声线的相对声压变化分布曲线的峰值位于
别对声线数目较多的声线集定位结果和对声线数
0,且正扰动和负扰动的数量基本保持平衡;而当目
目较小的声线集定位结果进行分析,验证本文提出
的定位方法的可行性。 标出现在声场中时,发生负扰动的声线数目增多,正
首先分析各个发射阵元对应的阵列接收信号 扰动和负扰动的数量出现明显的差异,另外可以观
结构,根据不同传播路径的本征声线到达时间的差 察到,有目标存在时,声线相对声压变化的范围明显
异分离声线,然后将所有可区分的声线记录到集合 大于无目标情况下的扰动范围。