
Page 20 - 《应用声学》2021年第6期
P. 20
816 2021 年 11 月
70 底反射路径的定位结果,结合图 11 进行对比,结
60 果表明采用掠射角更大的声线可以增加目标位
50 置的相关信息,从而提高目标定位的精度。对于
ܦጳᄬ 40 实验中的目标位置,直达路径的扰动声线提供了
目标的深度信息,而一次水底反射路径的声线扰
30
动提供了目标的距离信息,因此仅采用直达路径
20
和一次水底反射路径即可确定目标位置的大致
10
范围,但与图 11 相比,定位结果的精度具有一定
0
-0.15 -0.10 -0.05 0 0.05 0.10 0.15 的损失。
ᄱࠫܦԍԫӑ
(a) ᄬಖᄊܦጳүѬ࣋
0
140
5
120
100 10
ܦጳᄬ 80 ງए/m 15
60
40 20
20
0 10 20 30 40 50 60 70
0 ᡰሏ/m
-0.4 -0.2 0 0.2 0.4 0.6 0.8
(a) ᄬಖࠀͯፇ౧
ᄱࠫܦԍԫӑ
(b) దᄬಖᄊܦጳүѬ࣋ 3.0
图 10 相对声压变化统计结果 2.5
Fig. 10 The distributions of relative pressure 2.0
changes ງए/m 1.5
在发射阵和接收阵构成的探测平面内,x 轴 1.0
和 z 轴均采用 0.1 m 的间隔对探测区域进行划分,
0.5
然后根据图 10(b) 中各个声线相对声压变化的分
0
布情况确定扰动声线的集合 Q p ,并应用式 (10) 分 0 5 10 15 20 25
ᡰሏ/m
别计算每个扰动声线的相对声压变化值,最后采 (b) ງएவՔʽᄊࠀͯజጳ
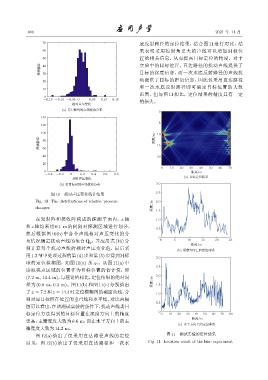
用 1.3 节中处理过程的第 (4) 步和第 (5) 步得到目标 3.0
球的定位模糊图,如图 11(a) 所示。从图 11(a) 中
2.5
读取亮点区域的位置作为目标位置的估计值,即
(7.2 m, 14.4 m),与理论值相比,定位结果的绝对误 2.0
差为 (0.8 m,0.3 m)。图 11(b) 和图 11(c) 分别给出 ງए/m 1.5
了x = 7.2和z = 14.4时定位模糊图的截面曲线,分 1.0
别对应目标所在位置的垂直线和水平线,对比两幅
0.5
图可以看出,在该湖试实验的条件下,扰动声线类目
0
标定位方法得到的目标位置在深度方向上的精度 0 10 20 30 40 50 60 70 80
ᡰሏ/m
更高,主瓣宽度大致为 6.6 m,而在水平方向上的主
(c) ඵࣱவՔʽᄊࠀͯజጳ
瓣宽度大致为14.2 m。
图 12(a) 给出了仅采用直达路径声线的定位 图 11 湖试实验的定位结果
结果,图 12(b) 给出了仅采用直达路径和一次水 Fig. 11 Location result of the lake experiment