
Page 22 - 《应用声学》2021年第6期
P. 22
818 2021 年 11 月
围较大,这主要是因为第 2 条到达波经过了一次海 探测盲区较小,值得注意的是,这里的海底假设为平
面反射,海面受波浪和风速等影响产生的水面起伏 面,而实际上的海底地形会更复杂。对比图 9(b) 和
引起了第2条到达波的扰动。 图18可以看出,在海试条件下均匀分布的阵元构成
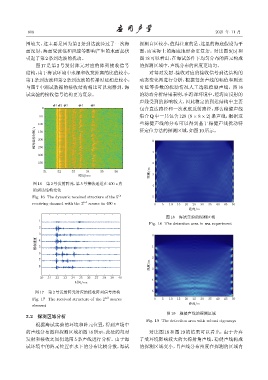
图 17 是第 2 号发射阵元对应的阵列接收信号 的探测区域中,声线分布的密度更均匀。
结构,由于海试环境中水深和收发距离的比值较小, 对每对发射 -接收对应的接收信号到达结构的
第1 条到达波和第2条到达波的传播时延相差较小, 动态变化图进行分析,根据每条声线的幅值和到达
与图 7 中湖试数据的接收结构相比可以观察到,海 时延等参数的扰动情况人工选取稳健声线。图 16
试实验的接收信号结构更为复杂。 的动态分析结果表明,在海洋环境中,经海面反射的
声线受到的影响较大,因此稳定的到达结构中主要
#1 #2 #3 #4 #5
0 包含直达路径和一次水底反射路径,那么稳健声线
50 集合 Q 中一共包含 128 (8 × 8 × 2) 条声线,根据这
100 些稳健声线的分布可以得到基于稳健声线扰动特
ᄱࠫᤂᛡᫎ/s 150 0
征定位方法的探测区域,如图19所示。
200
250
1
300
350 2
ງए/m 3
31 32 33 34 35 36
ᫎ/ms
图 16 第 2 号发射阵元、第 5 号接收通道在 400 s 内
4
的到达结构变化
Fig. 16 The dynamic received structure of the 5 th 5
receiving channel with the 2 nd source in 400 s 0 5 10 15 20 25 30 35 40 45 50
ᡰሏ/m
图 18 海试实验的探测区域
1
Fig. 18 The detection area in sea experiment
2
3
0
ଌஆᤰ᥋ 4 5 1
6
2
7
ງए/m
8 3
30 31 32 33 34 35 36 37 38 39 40
4
ᫎ/ms
图 17 第 2 号发射阵元对应的接收阵列信号结构 5
Fig. 17 The received structure of the 2 nd source 0 5 10 15 20 25 30 35 40 45 50
element ᡰሏ/m
图 19 稳健声线的探测区域
3.2 探测区域分析
Fig. 19 The detection area with robust eigenrays
根据海试实验的环境和阵元位置,得到声场中
的声线分布图和探测区域如图18所示,此处的每对 对比图 18 和图 19 的结果可以看出,由于舍弃
发射和接收之间仍选用 5 条声线进行分析。由于海 了受环境影响较大的大掠射角声线,稳健声线构成
试环境中的阵元位置在水下的分布比较分散,海试 的探测区域变小,且声线分布密度在探测的区域内