
Page 18 - 《应用声学》2021年第6期
P. 18
814 2021 年 11 月
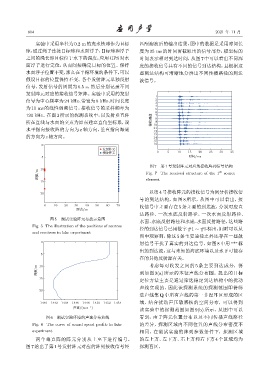
实验中采用半径为 0.2 m 的充水铁球作为目标 匹配滤波后的输出结果,图中的数据是采用时间长
球,通过绳子连接目标球和水面浮子,目标球和浮子 度为 35 ms 的时间窗截取出的信号部分,横坐标的
之间的绳长即目标位于水下的深度,应用GPS对水 时间表示相对到达时间,从图 7 中可以看出不同深
面浮子进行定位,从而间接确定目标的位置。保持 度的接收信号具有不同的信号到达结构,且根据这
水面浮子位置不变,那么在平稳环境的条件下,可以 些到达结构可清晰地分辨出不同传播路径的到达
假设目标的位置保持不变。各个发射阵元单独反射 波信号。
信号,发射信号的周期为 0.5 s,然后分别记录不同
发射阵元对应的接收信号矩阵。实验中采用的发射
1
信号为中心频率为24 kHz、带宽为8 kHz、时间长度 2 3
为 10 ms 的线性调频信号,接收信号的采样频率为 4 5
6
120 kHz。在图 3 所示的探测系统中,以发射垂直阵 7 8
所在直线与水面的交点为原点建立直角坐标系,设 ଌஆᤰ᥋ 10 9
水平指向接收阵的方向为 x 轴方向,垂直指向海底 11
12
的方向为z 轴方向。 13
14
15
0 16
ԧ࠱Ћ
ଌஆЋ 0 5 10 15 20 25 30 35
5 ᫎ/ms
图 7 第 1 号发射阵元对应的接收阵列信号结构
10
ງए/m Fig. 7 The received structure of the 1 st source
15 element
以第4 号接收阵元的接收信号为例分析接收信
20
号的到达结构,如图 8 所示,从图中可以看出,接
0 10 20 30 40 50 60 70 收信号中主要存在 5 条主要的到达波,分别对应直
ᡰሏ/m
达路径、一次水底反射路径、一次水面反射路径、
图 5 湖试实验阵元布放示意图
水面 -水底反射路径和水底 -水面反射路径,这些路
Fig. 5 The illustration of the positions of sources
径的到达信号已用数字#1 ∼ #5标出,同时可以从
and receivers in lake experiment
图中观察到,除这 5 条主要途径之外还存在一些散
0
射信号干扰了真实的到达信号,如图 8 中用 “*” 标
出的到达波,这与未知的海底环境以及水下可能存
5
在的其他反射源有关。
考虑每对收发之间的 5 条主要到达成分,得
ງए/m 10 到如图 9(a) 所示的本征声线分布图。提出的目标
15
定位方法主要是通过筛选稳定到达结构中的扰动
声线实现的,因此该探测系统的探测范围即待筛
20
选声线集 Q 中所有声线的第一菲涅耳区形成的区
1440 1442 1444 1446 1448 1450 1452 1454 域,结合扰动声压敏感核的空间分布,可以得到
ܦᤴ/(mSs -1 )
该实验中的探测范围如图 9(b) 所示,从图中可以
图 6 湖试实验环境的声速分布曲线 看到,由于阵元位置分布以及不同传播声线路径
Fig. 6 The curve of sound speed profile in lake 的差异,探测区域内不同位置的声线分布密度不
experiment 相同,在湖试实验的阵列参数条件下,探测区域
两个垂直阵的阵元分别从上至下进行编号。 的左上方、左下方、右上方和右下方 4 个区域均为
图 7 给出了第 1 号发射阵元对应的阵列接收信号经 探测盲区。