
Page 107 - 《应用声学》2023年第2期
P. 107
第 42 卷 第 2 期 李睿林等: 球形阵列自适应网格分层定位算法 295
础,作为先验信息,可以有效降低后续 SRP 网格分 总量的前提下,使球面网格尽量趋于均匀化。本文
层算法的计算量。 借助一种球面离散和快速分析框架,在球面上划分
1.3 SH-SRP 所需分辨率的等面积、独立、可细分的均匀分布网
格来解决球面的全局分析问题,实现球面信息利用
运用球谐系数 p nm (k, r a ),则波束形成,比如平
的最大化。
面波分解表示为
球面网格划分时,用 u 代表当前网格划分的层
N n
∑ ∑ p nm (k, r a )
m
y(θ l , φ l ) = Y (θ l , φ l ), (9) 次,则初始网格层次 u = 1 由 12 个曲面四边形 (网
n
b n (kr a )
n=0 m=−n
格或像素) 构成。每次细分以 2 × 2 对区域进行划
其中,(θ l , φ l ) 表示阵列的视角方向。得到的波束图
分,构成一个四叉树系统,网格 (像素) 允许以树结
称为常规波束图。由公式 (5) 以及球谐函数加法定
构进行索引。在分辨率级别 u ∈ N,该球面离散结
理,阵列波束方向图可以表示为 2(u−1)
构细分出 12 × 2 个等面积的独立网格,对应
∞ n √
∑ ∑ m m 3 π
∗
y (Θ) = a s (k) [Y (θ, φ)] Y (θ l , φ l ) 的角分辨率为Θ ∆ = ,Θ ∆ 代表网格几
n
n
π 3 × 2 u−1
n=0 m=−n
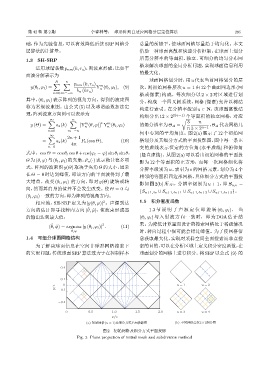
何中心间的平均角度。图 2(a) 展示了 12 个初始网
∞
∑ 2n + 1
= a s (k) P n (cos Θ), (10) 格划分及其细分方式的平面投影图,图中每一条正
4π
n=0 交的虚线表示恒定的方位角 (水平虚线) 和俯仰角
式中,cos Θ = cos θ l cos θ +cos(φ l − φ) sin θ l sin θ, (竖直虚线)。从图 2(a) 可以看出初始网格的平面投
Θ 为 (θ, φ) 与 (θ l , φ l ) 的夹角,P n (·) 表示勒让德多项 影为 12 个等面积的正方形,而每一次网格细化将
式。阵列的波束图 y(Θ)取决于夹角 Θ 的大小,通常
分辨率级别为 u、索引为 v 的网格元素,划分为 4 个
在 Θ = 0 时达到峰值,即该方向的平面波得到了最
相邻的等面积四边形网格,具体细分方式的平面投
大增益。改变 (θ l , φ l ) 的方向,即对 y(Θ) 旋转或转
影如图 2(b) 所示,分辨率级别为 u + 1,即 S u,v =
向,然而其自身的值并不会发生改变。使 Θ = 0 与
{S u+1,4v ∪ S u+1,4v+1 ∪ S u+1,4v+2 ∪ S u+1,4v+3 }。
(θ l , φ l )一致的方向,即为阵列的视角方向。
相应地,SH-SRP 定义为 |y(θ, φ)| 。声源到达 1.5 积分密度函数
2
ˆ
方向的估计即寻找转向方向 (θ, ˆφ),使波束形成器 1.3 节 说 明 了 声 源 定 位 即 旋 转 (θ l , φ l ), 当
的输出达到最大值: (θ l , φ l ) 与入射波方向一致时,即为 DOA 估计结
ˆ
2
(θ, ˆφ) = argmax |y (θ l , φ l )| . (11) 果。为降低计算量而设计的搜索网格处于稀疏情况
θ,φ 时,转向过程中很可能会错过峰值。为了使网格信
1.4 可细分球面网格结构 息获取最大化,实现对采样空间全面搜索而非点搜
为了解决球面信息在空间非球形网格搜索下 索的目的,可以在分析区域上定义积分密度函数,在
的失配问题,传统球面 SRP 算法致力于在控制样本 球面划分的网格上进行积分。将SRP以公式 (9) 的
0.4
0.1
0
y⊳p -0.1 u=1 u=2
-0.4
0 0.5 1.0 1.5 2.0 u=3 u=4
x⊳p
(a) ѺݽᎪಫ(u=1)ԣጺѬவरࣱ᭧આॖڏ (b) ˀՏᎪಫࡏ2T2ጺѬڏ
图 2 初始网格及细分方式平面投影
Fig. 2 Plane projection of initial mesh and subdivision method