
Page 109 - 《应用声学》2023年第2期
P. 109
第 42 卷 第 2 期 李睿林等: 球形阵列自适应网格分层定位算法 297
∆(u, v) < 0,表示当前网格细化前后无可用信息增 DOA 估计精度。因此本文提出自适应网格选择判
益,则保持原有的网格划分,并从四叉树结构中删除 据,根据 SH-MUSIC 先验确定的声源入射个数,将
该搜索路径。 判据应用于细分前后的网格选择过程中,来调整和
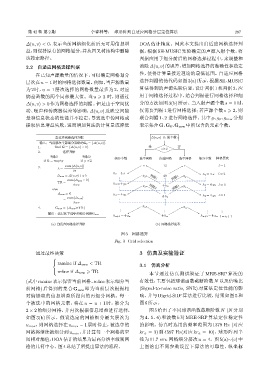
2.2 自适应网格选择判据 消除∆(u, v)的误差,增加网格选择的准确性和稳定
在已知声源数量的情况下,可以确定网格划分 性,使得计算量接近理论的最低范围。自适应网格
层次在u = 1时的网格选择数量。例如,当声源数量 选择判据的伪代码如图 3(a) 所示,根据 SH-MUSIC
为 2 时,u = 1 层次选择的网格数量最多为 2,对应 算法得到的声源先验信息,设计判据 1 和判据 2,应
熵差函数的两个局部最大值。当 u > 2 时,则通过 用于网格选择过程中,结合判据进行网格选择和细
∆(u, v) > 0作为网格选择的判据。但是由于空间扰 分的方法如图3(b) 所示。当入射声源个数s = 1时,
动、噪声和传感器误差等影响,∆(u, v) 反映空间能 仅需要判据 1 进行网格选择;若声源个数 s > 2,则
量和信息状态的性能并不稳定,导致选中伪网格或 联合判据 1、2 进行网格选择。其中 g、g 0 、g new 分别
提取信息增益失败,进而增加算法的计算量或降低 表示集合G、G 0 、G new 中所包含的元素个数。
ᒭᤠऄᎪಫᤥહѼ ∆(u֒v)Ḥ& ູ˔ s
ᣥКेҒࡏЛᦊጺѬኖ႕ᄊG ={∆(u֒v)}
1. find G={∆(u֒v) > 0} ௧ ա
sĺ2
2. ᤥહѼ
Ѽ1 Ѽ2 ጺѬ˔ ᤥ˗Ꭺಫ ܬᤥᎪಫ ᤥ˗Ꭺಫ ጺѬ˔ Ꭺಫࡏ
if G=empty if g Ĺ2
3. sum |∆(u,v)| s 12 s l/
λ=
g
h /Ss h /Ss l/
∆ new=∆(u,v)+a⋅λ g Ѽ1 48 Ѽ1 g 2
sum(∆ new > 0)
TR=
g new h /Sg h /Sg l/
g Sh g
Ѽ2 Ѽ1 3
else
∆ new=G
h /Sg h /Sg l/
sum(∆ new ) Sh
=
g new
g g
4. G new={∆ newĺTR} u u
⋮ ⋮ ⋮ ⋮
ᣥѣសࡏʾᤥ˗ᄊጺѬᎪಫG new
h u⇁ /Sg u Sh u h u⇁ /Sg u l/u⇁
(a) ᒭᤠऄᎪಫᤥહѼ (b) Ꭺಫᤥહืሮ
图 3 网格选择
Fig. 3 Grid selection
通过最终决策 3 仿真及实验验证
ramine if ∆ new < TR
3.1 仿真分析
refine if ∆ new > TR
本节通过仿真测试验证了 MRE-SRP 算法的
(式中 ramine 表示保留当前网格、refine表示细分当 有效性,主要包括球谐函数截断阶数 N 以及信噪比
前网格) 后得到的集合 G new 即为当前层次根据相 (Signal-to-noise ratio, SNR) 对算法定位性能的影
对熵提取的信息增益所指向的再细分网格。每一 响,并与 Higrid-SRP 算法进行比较,结果如图 5 和
个被选中的网格元素,将在 u = u + 1 时,被分为 图6所示。
2 × 2 的细分网格,并再次根据信息增益进行选择, 图 5 给出了不同球谐函数截断阶数 N (N 分别
如图 3(b) 所示。假设选定的网格细分最大层次为 为 4、5、6) 和波数 k 对 MRE-SRP 算法定位稳定性
u max ,则网格选择在 u max − 1 层时停止,被选中的 的影响。仿真时选用的频率范围为 1379 Hz (对应
网格将继续被细分到u max ,并计算每一个网格的空 kr a = 3) 到 4597 Hz(对应 kr a = 10),球形阵列半
间相对熵值,DOA估计的结果为最高分辨率级别网 径为 11.7 cm,网格细分层次 u = 4。图 5(a)∼(c) 中
格的几何中心。图4总结了所提出算法的流程。 上图给出不同参数设置下算法的可靠性,纵坐标