
Page 113 - 《应用声学》2023年第2期
P. 113
第 42 卷 第 2 期 李睿林等: 球形阵列自适应网格分层定位算法 301
为 MRE-SRP 算法计算时间的占比情况,从图 9 中 位算法中,MRE-SRP 算法在减少 75% 计算量的同
可以看出计算所用时间与选择网格数的情况相吻 时,可以达到略高于原算法的定位精度。
合。在单、双声源定位算法中,MRE-SRP 算法迭代
到 u = 4 时所需时间仅为 HiGrid-SRP 的 15.43% 和 4.5 MAE ϕ MAE θ MAE
HiGrid-SRP MRE-SRP
23.21%,在减小计算量,降低计算耗时方面有了明 4.0
3.5
显的提高。 3.0
ࣱکࠀͯឨࣀ/(O) 2.5
HiGrid-SRP MRE-SRP
12.97% 2.0
18.48% 1.5
1.0
0.5
0
ӭܦູ ԥܦູ
(a) ᄇ٪ܦࠀࣱͯکࠀͯឨࣀ
ӭܦູ ԥܦູ
MAE
MAE θ
MAE ϕ
图 9 两种算法的计算耗时对比 4.5
HiGrid-SRP MRE-SRP
Fig. 9 Comparison of calculation time consump- 4.0
tion between the two algorithms 3.5
ࣱکࠀͯឨࣀ/(O)
3.0
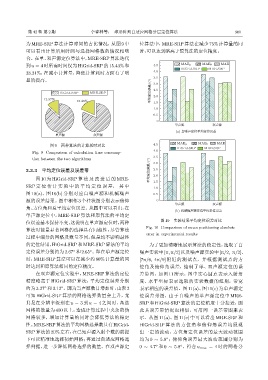
3.3.3 平均定位误差及误差带 2.5
图 10 为 HiGrid-SRP 算 法 及 改 进 后 的 MRE- 2.0
1.5
SRP 定 位 估 计 实 验 中 的 平 均 定 位 误 差, 其 中 1.0
图 10(a)、图 10(b) 分别对应白噪声源和机械噪声 0.5
源的误差结果。图中相邻 3 个柱状图分别表示俯仰 0
ӭܦູ ԥܦູ
角、方位角和总平均定位误差。从图中可以看出,在
(b) ٪ܦູࠀࣱͯکࠀͯឨࣀ
单声源定位中,MRE-SRP 算法和原算法的平均定
图 10 实验结果平均定位误差对比
位误差基本保持不变,这说明在单声源定位时,两种
Fig. 10 Comparison of mean positioning absolute
算法对能量显著网格的选择具有同趋性,尽管算法
error in experimental results
过程中细分的网格及数量不同,但是均不影响最终
的定位结果,HiGrid-SRP和MRE-SRP算法的平均 为了更加清晰地展示算法的稳定性,选取了白
定位误差分别约为 2.67 和 2.65 。即在单声源定位 噪声实验中 [π, π/2] 以及噪声源实验中 [π/2, π/2]、
◦
◦
时,MRE-SRP 算法可以在减少约 80% 计算量的同 [7π/6, 4π/9] 附近的测试点,并根据测试点的方
时达到和原算法相同的定位精度。 位角及俯仰角误差,绘制了单、双声源定位的误
在双声源定位实验中,MRE-SRP 算法的定位 差带图,如图 11 所示,图中实心圆点表示入射角
精度略高于 HiGrid-SRP 算法,平均定位误差分别 度、水平坐标表示选取的实验数据的组别,带宽
约为3.37 和3.12 。因为当声源数目增加时,由表 2 表示相应的误差值。图 11(a)、图 11(c) 为单声源定
◦
◦
可知 HiGrid-SRP 算法的网格选择数量会上升,尤 位误差带图,由于白噪声的单声源定位中 MRE-
其是在分辨率级别在 u = 3 到 u = 4 之间时,备选 SRP 和 HiGrid-SRP 算法的定位精度十分接近,因
网格的数量为 400 以上,造成计算过程中夹杂的伪 此其误差带情况也相似,可用同一误差带图来表
网格较多,增加计算量的同时会降低算法的稳定 示。从图 11(a)、图 11(c) 中可以看出 MRE-SRP 和
性。MRE-SRP算法的平均网格选择数只有HiGrid- HiGrid-SRP 算法的方位角和俯仰角误差均展现
SRP 算法的 20% 左右,在已知声源入射个数的前提 出一定的波动,方位角定位误差的最大波动范围
下可以精准地选择初始网格;再通过自适应网格选 均为 0 ∼ 5.8 ;俯仰角误差最大波动范围分别为
◦
择判据,进一步降低网格选择的数量。在双声源定 0 ∼ 4.7 和 0 ∼ 5.8 ,符合 u max = 4 时的网格分
◦
◦