
Page 53 - 《应用声学》2023年第3期
P. 53
第 42 卷 第 3 期 袁笑等: 基于最小 Csiszár’s I-散度的高精度深度定位方法 491
E P 近似估计向量 A,其对接收到的垂直阵数据 伏,拖曳声源也会随之抖动,再加上垂直阵的倾斜、
+
的模态分解效果并不理想;另外,声源的运动会引 海洋环境参数的变化等原因,在实际处理中,深度
起快拍欠缺;这都会导致最后估计的协方差矩阵存 定位往往会出现偏差:如在图 10 中,可以看到基
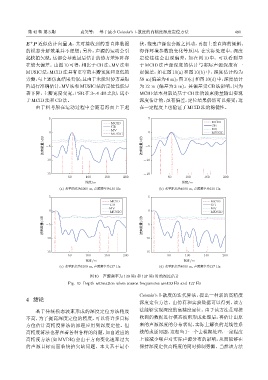
在较大偏差。由图 10可得,相比于 CB 法、MV 法和 于 MCID 法声源深度的估计与实际声源深度有一
MUSIC法,MCID法具有更窄的主瓣宽度和更低的 定偏差,如在图 10(a) 和图 10(b) 中,深度估计约为
旁瓣,与上述仿真结果类似;且由于未能对协方差矩 58 m(偏差为4 m);图10(c)和图10(d)中,深度估计
阵进行准确估计,MV法和MUSIC法的定位性能显 为 12 m (偏差为 3 m)。其偏差受 CB 法影响,因为
著下降,主瓣宽度变宽,PSR 在 3∼4 dB 之间,远小 MCID 法本身就是基于 CB 法的波束能量输出实现
于MCID法和CB法。 深度估计的,虽有偏差,定位结果仍然可以接受;这
由于科考船在运动过程中会随着海面上下起 在一定程度上也验证了MCID法的稳健性。
5 5
MCID
MCID
CB CB
MV MV
0 0 MUSIC
MUSIC
ฉౌᑟ᧚/dB -5 ฉౌᑟ᧚/dB -5
-10 -10
-15 -15
50 100 150 200 50 100 150 200
ງए/m ງए/m
(a) ඵࣱᡰሏ˞5200 m, ܦູᮠဋ˞130 Hz (b) ඵࣱᡰሏ˞4000 m, ܦູᮠဋ˞130 Hz
5 5
MCID MCID
CB CB
MV MV
0 0
MUSIC MUSIC
ฉౌᑟ᧚/dB -5 ฉౌᑟ᧚/dB -5
-10 -10
-15 -15
50 100 150 200 50 100 150 200
ງए/m ງए/m
(c) ඵࣱᡰሏ˞5200 m, ܦູᮠဋ˞127 Hz (d) ඵࣱᡰሏ˞4000 m, ܦູᮠဋ˞127 Hz
图 10 声源频率为 130 Hz 和 127 Hz 时的深度估计
Fig. 10 Depth estimation when source frequencies are130 Hz and 127 Hz
Csiszár’s I-散度的迭代算法,提出一种新的高精度
4 结论
深度定位方法。由仿真和实验数据可以得到,该方
基于传统模态波束形成的深度定位方法精度 法能够实现深度的高精度定位。由于该方法是对接
不高,为了提高深度定位的精度,可以将许多目标 收到的数据进行模态波束形成处理后,再估计出原
方位估计高精度算法的原理应用到深度定位。但 来的声源深度的分布状况,实际上解决的是线性系
高精度算法也存在着各种各样的问题,如自适应的 统的求逆问题,这相当于一个去模糊处理,一定程度
高精度方法 (如 MVDR) 会由于方向变化速率过大 上能减少噪声对实际声源分布的影响,从而能够在
的声源目标而面临快拍欠缺问题。本文基于最小 保持深度定位高精度的同时抑制旁瓣。当然该方法