
Page 49 - 《应用声学》2023年第3期
P. 49
第 42 卷 第 3 期 袁笑等: 基于最小 Csiszár’s I-散度的高精度深度定位方法 487
Yang [23] 应用最小方差原理,得到一种高精度 2.1 高精度和低旁瓣
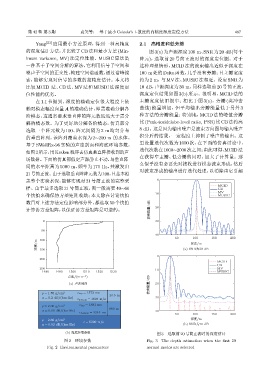
的深度估计方法,并比较了CB 法和最小方差(Min- 图 3(a) 为声源深度 100 m、SNR为 20 dB(每个
imum variance, MV) 法定位性能。MUSIC 算法是 阵元),选取前 20 号简正波时的深度定位图。对于
一种基于子空间分解的算法,它利用信号子空间和 这种理想情形,MCID 法的波束输出近似于深度在
噪声子空间的正交性,构建空间谱函数,通过谱峰搜 100 m 处的 Delta 函数,几乎没有旁瓣;且主瓣宽度
索,能够实现对信号的参数的高精度估计。本文将 约为 2 m,与 MV 法、MUSIC 法相近。设定 SNR 为
比较 MCID 法、CB 法、MV 法和 MUSIC 法深度定 10 dB,声源深度为 30 m,同样选取前 20 号简正波,
位性能的优劣。 深度定位结果如图 3(b) 所示。很明显,MCID 法的
在 1.1 节提到,深度的精确定位很大程度上依 主瓣宽度依旧很窄;相比于图 3(a),旁瓣 (类冲击
赖对模态幅度向量 A 的准确估计,即需准确分解各 曲线) 能量增加,但平均输出旁瓣能量低于另外 3
阶模态,这通常要求垂直阵的阵元数远远大于需分 种方法的旁瓣能量;特别地,MCID 法的峰值旁瓣
解的模态数。为了更好地分解各阶模态,仿真部分 比(Peak-tosidelobe-level ratio, PSR) 比CB 法约高
选取一个阵元数为 100、阵元间隔为 2 m 均匀分布 8 dB。这是因为输出噪声是波束方向图与输入噪声
积分后的结果,一定程度上抑制了噪声的输出。这
的垂直阵列,该阵列覆盖水深为 2∼200 m 的水体。
里设置迭代次数为 1000 次,在下面的仿真讨论中,
基于 SWellEx-96 实验的声速剖面和海底环境参数,
迭代次数在1000∼2000次之间;由此可得,MCID法
如图2所示,用Kraken程序去仿真垂直阵接收到的声
在获得窄主瓣、低旁瓣的同时,加大了计算量。那
场数据。下面的仿真都假定声源静止不动,与垂直阵
么似乎没有必要先对接收进行模态波束形成,然后
间的水平距离为 5000 m,频率为 170 Hz,共激发出
对波束形成的输出进行迭代处理,以消除由它引起
21号简正波。由于选取垂直阵阵元数为100,且基本覆
盖整个实验水深,能够实现对21号简正波的完整采 0
MCID
样。由于最多选取 21 号简正波,则一般需要 40∼60 CB
MV
个快拍来确保协方差矩阵收敛;本文除在讨论快拍 -10 MUSIC
数目对上述方法定位影响部分外,都选取 50个快拍
ฉౌᑟ᧚/dB
计算协方差矩阵,以保证协方差矩阵是可逆的。 -20
0 -30
50
-40
50 100 150 200
100
ງए/m 150 (a) SNR˞20 dB
ງए/m
0
200
MCID
CB
250 -10 MV
1480 1490 1500 1510 1520 1530 MUSIC
ฉౌᑟ᧚/dB
ܦᤴ/(mSs -1 )
(a) ܦᤴҖ᭧ -20
ρ=1.76 g/cm 3 c top =1572 ms
23.5 m
α=0.2 dB/(kmSHz) -30
c bottom =1593 m/s
ρ=2.06 g/cm 3 c top =1881 ms
800 m
α=0.06 dB/(kmSHz) -40
c bottom =3245 ms
50 100 150 200
ρ=2.66 g/cm 3 ງए/m
c=5200 m/s
α=0.02 dB/(kmSHz) (b) SNR˞10 dB
(b) ๒अဗܒԠ 图 3 选取前 20 号简正波时的深度估计
图 2 环境参数 Fig. 3 The depth estimation when the first 20
Fig. 2 Environmental parameters normal modes are selected