
Page 80 - 《应用声学》2024年第6期
P. 80
1256 2024 年 11 月
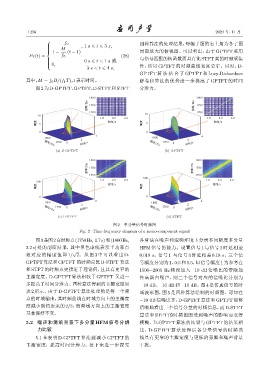
f 0 四种算法的处理结果,每幅子图的右上角为各子图
, 1 s 6 t 6 3 s,
M
局部放大的俯视图。可以看出,由于 GPTFT 采用
1 − (t − 1)
F T (t) = f 0 (28) 与信号匹配的核函数而具有比STFT高的时频聚集
0 s 6 t < 1 s 或
0, 性,所以 GPTFT 的时频曲线宽度更窄。同时,D-
3 s < t 6 4 s,
GPTFT 算 法 结 合 了 GPTFT 和 Lucy-Richardson
其中,M = f 0 B/(f 1 T),t表示时间。 解卷积算法的优势进一步提高了 GPTFT 的时间
图2为D-GPTFT、GPTFT、D-STFT和STFT 分辨力。
1800 1800
ᮠဋ/Hz 1780 ᮠဋ/Hz 1780
1760 1760
10
10
1.8 2.0 2.2 1.8 2.0 2.2
ࣨए 5 ᫎ/s ࣨए 5 ᫎ/s
0 0
4 4
1800 1800
2 2
1700 0 ᫎ/s ᮠဋ/Hz 1700 0 ᫎ/s
ᮠဋ/Hz
(a) D-GPTFT (b) GPTFT
1800 1800
ᮠဋ/Hz 1780 ᮠဋ/Hz 1780
1760 1760
500
1.8 2.0 2.2 1.8 2.0 2.2
500
ࣨए ᫎ/s ࣨए ᫎ/s
0 0
4 4
1800 1800
2 2
1700 0 1700 0
ᫎ/s ᮠဋ/Hz ᫎ/s
ᮠဋ/Hz
(c) D-STFT (d) STFT
图 2 单分量信号时频图
Fig. 2 Time-frequency diagram of a mono-component signal
图3是图2在时频点(1750 Hz, 1.7 s)和(1800 Hz, 各算法在噪声和混响环境下分辨不同幅度多分量
2.2 s) 处的剖面结果,其中黑色虚线表示半功率点 HFM 信号的能力。设置信号 1 与信号 2 时延相差
√
处对应的幅度值即 1/ 2。从图 3 中可以看出 D- 0.018 s,信号 1 与信号 3 时延相差 0.18 s,三个信
GPTFT算法和GPTFT 的时频点比D-STFT 算法 号幅度分别为 1、0.5 和 0.5,以信号幅度 1 为参考在
和 STFT 的时频点更接近于理论值,且具有更窄的 1500∼2000 Hz 频段加入 −10 dB 信噪比的带限加
主瓣宽度。D-GPTFT 算法相较于 GPTFT 又进一 性高斯白噪声,则三个信号对应的信噪比分别为
步提高了时间分辨力。四种算法得到的主瓣宽度如 −10 dB、−16 dB 和 −16 dB。图 4 是仿真信号的时
表 2 所示。由于 D-GPTFT 算法处理的是每一个频 域波形图,图 5 是四种算法绘制的时频图。可知在
点的时域输出,其时频曲线在时域方向上的主瓣宽 −10 dB 信噪比下,D-GPTFT 算法和 GPTFT 能够
度减小到约原来的 2/3,而频域方向上的主瓣宽度 清晰地看出三个信号分量的时频信息,而 D-STFT
基本保持不变。 算法和 STFT 的时频图因受到噪声的影响而变得
5.2 噪声和混响背景下多分量 HFM 信号分辨 模糊。D-GPTFT 算法的结果与 GPTFT 的结果相
力比较 比,D-GPTFT 算法处理后各分量信号的时频曲
5.1 节表明 D-GPTFT 算法能减小 GPTFT 的 线具有更窄的主瓣宽度与更低的旁瓣和噪声背景
主瓣宽度,提高时间分辨力,接下来进一步探究 干扰。