
Page 125 - 201903
P. 125
第 38 卷 第 3 期 常俊杰等: 钢轨踏面的空气耦合超声检测方法 407
(a) ඵࣱүവर (b) ۇᄰүവर
图 2 用于主模式计算的细分和选定节点
Fig. 2 Segments and selected nodes for master
mode calculation
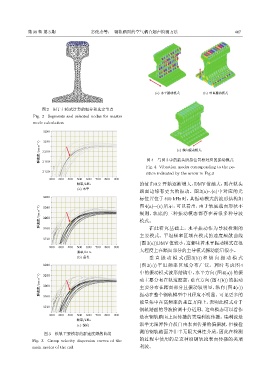
Ꮖᤴए/(mSs -1 ) 与图 3 中的箭头所指位置相对应的振动模式
(c) ጫՔүവर
图 4
Fig. 4 Vibration modes corresponding to the po-
sition indicated by the arrow in Fig.3
ᮠဋ/kHz 的值由 0.2 开始逐渐增大,DMV 值越大,则在轨头
(a) ඵࣱ
踏面边缘有更大的振动。图 3(a)∼(c) 中对应的光
标位置位于 400 kHz 时,其振动模式的波形结构如
图 4(a)∼(c) 所示,可以看出,由于轨底截面形状不
Ꮖᤴए/(mSs -1 ) 规则,轨底的三种振动模态都存在着很多种导波
模式。
在此研究基础上,水平振动作为导波检测的
主要模式。平坦频率区域在模式的速度频散曲线
(图 3(a))DMV 值较小,这意味着水平振动模式在很
大程度上在踏面部分的主导模式振动能量很小。
ᮠဋ/kHz
(b) ۇᄰ 垂 直 振 动 模 式 (图 3(b)) 和 纵 向 振 动 模 式
(图 3(c)) 平坦频率区域分布广泛。同时考虑图 4
中的振动模式波形结构中,水平方向 (图 4(a)) 的振
Ꮖᤴए/(mSs -1 ) 动主要分布在轨道腰部,垂直方向 (图 4(b)) 的振动
主要分布在踏面部分且振动较明显,纵向 (图 4(c))
振动在整个钢轨模型中且程度不明显。可见更多的
能量集中在高频率的垂直方向上,表明此模式对于
钢轨踏面的导波检测十分适用。这些模态可以看作
是在钢轨踏面上面传播的类瑞利波传播。瑞利波是
ᮠဋ/kHz
(c) ጫՔ 沿半无限弹性介质自由表面传播的偏振波,但被检
测的钢轨踏面并非半无限大弹性介质,因此在检测
图 3 铁轨主要模态的群速度频散曲线
Fig. 3 Group velocity dispersion curves of the 的过程中使用的是这种沿钢轨浅表面传播的类瑞
main modes of the rail 利波。