
Page 210 - 应用声学2019年第4期
P. 210
670 2019 年 7 月
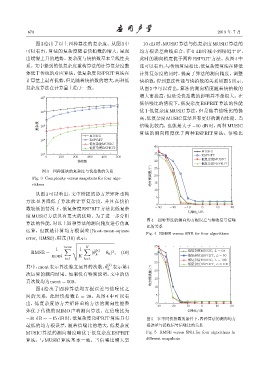
图 3 给出了以上四种算法的复杂度。从图 3 中 −10 dB时,MUSIC算法与低复杂度MUSIC算法的
可以看出,算法的复杂度随着快拍数的增大,呈现 均方根误差曲线重合,在 0 dB 时减小到接近于 0 ,
◦
出缓慢上升的趋势。复杂度与快拍数基本呈线性关 此时的测向精度优于两种 ESPRIT 方法。从图 4 中
系。文中提到的低复杂度重构算法的计算复杂度整 还可以看出,与传统算法相比,低复杂度算法在降低
体低于传统的对应算法。低复杂度 ESPRIT算法在 计算复杂度的同时,提高了算法的测向精度。调整
计算量上最有优势,但是随着快拍数的增大,两种低 快拍数,得到算法性能与快拍数的关系如图 5 所示。
复杂度算法在计算量上趋于一致。 从图 5 中可以看出,算法的测向精度随着快拍数的
增大而提高,但是受快拍数的影响并不是很大。在
10 7
低信噪比的情况下,低复杂度 ESPRIT 算法的性能
优于低复杂度 MUSIC 算法,但是随着信噪比的提
10 6
高,低复杂度MUSIC算法具有更好的测向性能。当
ܭాए 10 5 信噪比较高,也就是大于 −10 dB 时,两种 MUSIC
算法的测向精度优于两种 ESPRIT 算法。信噪比
MUSIC
10 4 ESPRIT
ͰܭాएMUSIC
ͰܭాएESPRIT 40
MUSIC
10 35 ESPRIT
3
0 100 200 300 400 500
ͰܭాएMUSIC
ঌથ 30
ͰܭాएESPRIT
图 3 四种算法的复杂度与快拍数的关系 25
Fig. 3 Complexity versus snapshots for four algo- کவಪឨࣀ/(O) 20
rithms 15
10
从图 3 可以看出,文中所提的协方差矩阵重构
5
方法显著降低了算法的计算复杂度,并且在快拍
0
数较低的情况下,低复杂度 ESPRIT 方法比低复杂 -30 -20 -10 0 10 20
η٪උ/dB
度 MUSIC 方法具有更大的优势。为了进一步分析
图 4 四种算法的测向均方根误差与接收信号信噪
算法的性能,对以上四种算法的测向精度进行仿真
比的关系
运算,也就是计算均方根误差 (Root-mean-square
Fig. 4 RMSE versus SNR for four algorithms
error, RMSE),用式(10)表示:
v
mont u K 35
1 ∑ u 1 ∑ (i) ͰܭాएMUSIC, L=50
2
RMSE = t (θ ˆ − θ k ) , (10) 30
mont K k ͰܭాएESPRIT, L=50
i=1 k=1 ͰܭాएMUSIC, L=100
25 ͰܭాएESPRIT, L=100
ˆ
其中,mont 表示算法独立运算的次数,θ (i) 表示第 i
k 20
次运算的测向结果。如果没有特别说明,文中的仿 کவಪឨࣀ/(O)
真次数均为mont = 500。 15
图 4 给出了四种算法均方根误差与信噪比之 10
间的关系,此时快拍数 L = 20。从图 4 中可以看 5
出,低复杂度协方差矩阵重构方法的测向性能整 0
-30 -20 -10 0 10 20
体优于传统的 MIMO 声呐测向算法。在信噪比为 η٪උ/dB
−30 dB ∼ −15 dB 时,低复杂度 ESPRIT算法具有 图 5 在不同快拍数的条件下,四种算法的测向均方
最低的均方根误差,随着信噪比的增大,低复杂度 根误差与接收信号信噪比的关系
MUSIC 算法的测向精度略优于低复杂度 ESPRIT Fig. 5 RMSE versus SNR for four algorithms in
算法,与 MUSIC 算法基本一致。当信噪比增大至 different snapshots