
Page 91 - 应用声学2019年第5期
P. 91
第 38 卷 第 5 期 奚畅等: 利用拖线阵运动特性的阵形估计方法 843
为相对于本船的舷角,再转化为相对于本船的方位 转弯半径转过 120 ,以 Ablow 模型计算结果为真实
◦
角。因此,估计阵形与真实阵形各自首尾阵元连线 阵形,利用本文方法得到估计阵形。对于不同转弯
的法向之差,可以表示阵形估计误差造成的目标方 半径的机动情况,相比于未校正阵形(直线阵),计算
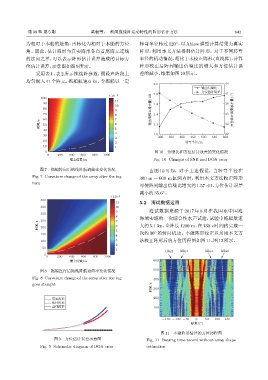
位估计误差,示意图如图9所示。 阵形校正后阵列输出信噪比的增大和方位估计误
采用表 1、表 2 所示拖线阵参数,假设声阵段上 差的减小,结果如图10所示。
均匀嵌入 41 个阵元,拖船航速 6 kn,令拖船以一定
2.0 44
ᣥѣη٪උ
வͯͥᝠឨࣀ
1.8 41
T10 -4
100
11
90 1.6 38
10
80
9 ᣥѣη٪උܙܸ᧚/dB வͯͥᝠឨࣀѓ࠵᧚/(O)
70 8 1.4 35
60 7
ᫎ/s 50 6 1.2 32
40 5
4 29
30 1.0 300 350 400 450 500 550 600
3
20
2 ᣁिӧय़/m
10 1
0 图 10 信噪比和方位估计误差的变化情况
0 200 400 600 800 1000
፶ʽͯᎶ/m Fig. 10 Changes of SNR and DOA error
图 7 拖船转向后拖线阵航迹曲率变化情况 由图 10 可知,对于上述假设,当转弯半径在
Fig. 7 Curvature change of the array after the tug 300 m ∼ 600 m 区间内时,利用本文方法校正阵形
turn
可使阵列输出信噪比增大约1.57 dB,方位估计误差
减小约35.6 。
◦
T10 -4
400
11 5.2 海试数据运用
350 10
9 海试数据来源于 2017 年 8 月在我国东中国海
300
8 海域实施的一次综合性水声试验,试验中拖船航速
ᫎ/s 250 7 6 大约 5.1 kn,全阵长 1200 m,在 130 s 时间内完成一
200
5
◦
150 4 次约 30 的转向机动。不做阵形校正以及用本文方
100 3 法校正阵形后的方位历程图如图11、图12所示。
2
50
1
ᄬಖ2 ᄬಖ1 ᄬಖ1 ᄬಖ2
0
0 200 400 600 800 1000
፶ʽͯᎶ/m 600
图 8 拖船直行后拖线阵航迹曲率变化情况 500
Fig. 8 Curvature change of the array after the tug 400
goes straight
ᫎ/s 300
ᄾࠄॎ 200
ͥᝠॎ
ᄰጳॎ 100
-150 -100 -50 0 50 100 150
ᓓᝈ/(O)
图 11 不做阵形估计的方位历程图
图 9 方位估计误差示意图 Fig. 11 Bearing time record without array shape
Fig. 9 Schematic diagram of DOA error estimation