
Page 38 - 《应用声学》2019年第6期
P. 38
940 2019 年 11 月
圆环的角度,然后采用前方交会法计算着靶坐标。
0 引言
交会计算公式如下:
常规武器弹丸立靶弹着点坐标是衡量火炮武 x p = x A cot B + x B cot A − y A + y B ,
cot A + cot B
器系统性能和评估武器射击精度的重要参数,直 (1)
接影响武器射表编拟及鉴定 [1] 。在直瞄类及高射 y A cot B + y B cot A + x A − x B ,
y p =
cot A + cot B
火炮试验中一般都需要进行弹着点坐标的测试,在
其中,(x p , y p )是弹着点坐标,(x A , y A )和(x B , y B )分
工程应用中的测试方法有光学测试法和声学测试
别是两个阵中心的坐标,A 和 B 分别是两个测量的
法 [2−4] 。光学测试法对于小、暗、弱、快目标的测量
角度。
效果不佳;声学测试法设备结构简单,使用方便,成
本低,能够弥补光学测试法的不足。
声学测试法利用超声速弹丸在飞行过程中产
生激波,激波前后压力差变化触发传声器,并产生时
延来进行定位。声学靶能够测试单发弹丸弹着点坐
标,也能测试连发弹着点坐标,并且能够识别弹序。
国内外对声学靶进行了大量研究 [5−9] 。目前,在工
程应用中广泛使用的是直线声学靶 [10−12] ,其缺点
是在与直线垂直的方向上误差较大,影响直线声学
靶的实际应用。传感器布阵对弹着点精度测试的影
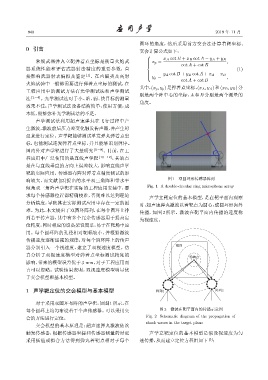
响较大,而文献 [13] 提出的水平双三角阵和带水平 图 1 双圆环形传感器阵列
倾角双三角阵声学靶在实际的工程应用安装中,要 Fig. 1 A double-circular ring microphone array
求每个传感器位置都精确校准,否则难以达到理论
声学立靶定位的基本模型,是在靶平面内观察
分析精度,导致其在实际测试应用中存在一定的困
时,超声速弹丸激波以着靶点为圆心,成圆环形向外
难。为此,本文提出了双圆环阵列,在每个圆环上排
传播,如图 2 所示。激波在靶平面内传播的速度称
列若干传声器,其中有多个冗余传感器用于提高定 为视速度。
位精度,同时相应的设备架设简单,易于在靶场中应
用。每个圆环阵的孔径相对靶幅较小,并根据激波
传播速度逐渐递减的规律,对每个圆环阵上的传声
器分别引入一个视速度,建立了双视速度模型。仿 ᭬᭧
真分析了双视速度模型对弹着点坐标测试精度的
ुᅌག
影响,带来的模型误差优于 3 mm,对于工程应用而
言可以忽略。试验结果表明,双视速度模型明显优
于交会模型和基本模型。
1 声学靶定位的交会模型与基本模型 ѵ ѵ
对于采用双圆环布阵的声学靶,如图 1所示,在
每个圆环上均匀布设若干个声传感器。可以采用交 图 2 激波在靶平面内的传播示意图
会的方法进行定位。 Fig. 2 Schematic diagram of the propagation of
shock waves in the target plane
交会模型的基本原理是:超声速弹丸激波依次
触发传感器,根据传感器坐标和传感器测量的时延 声学立靶定位的基本模型是假设视速度为匀
采用插值或拟合方法得到弹丸着靶点相对于每个 速传播,从而建立定位方程组如下 [5] :