
Page 107 - 《应用声学》2020年第2期
P. 107
第 39 卷 第 2 期 詹飞等: 水下回波处理中分数阶傅里叶变换的带通采样实现方法 265
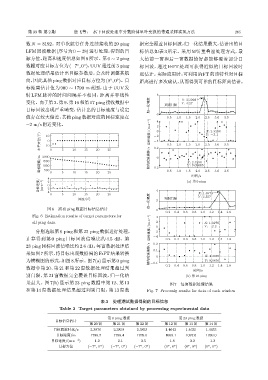
数 N = 8192。对单次航行任务连续接收的 29 ping 据完全覆盖目标回波,归一化结果最大,估计出的目
LFM回波数据(序号为0 ∼ 28)进行处理,得到的目 标信息如表 3 所示。采用 50% 重叠窗处理方式,最
标方位、距离和速度信息如图6所示。第0 ∼ 2 ping 大值前一窗和后一窗数据恰好都能够覆盖部分目
数据对应目标方位为(−7 , 0 ),UUV通过前 3 ping 标回波,通过 FrFT 处理可获得近似的目标回波时
◦
◦
数据处理结果估计出目标参数后,会及时调整其航 延估计。实际应用时,可利用FrFT的该特性对目标
向,因此其他 ping数据对应目标方位为 (0 , 0 )。目 距离进行多次确认,从而得到可靠的目标距离估计。
◦
◦
标距离估计值为 900 ∼ 1790 m 范围,由于 UUV 发
射 LFM 脉冲的时间间隔并不相同,距离并非线性 5
变化。由于第2、第9、第16和第17 ping接收数据中 Ѽѿ᫃ᬍ X. ⊲
Y . ⊲
目标回波出现严重畸变,估计出的目标速度与设定 ॆʷӑࣨए
值存在较大偏差,其他 ping 数据对应的目标速度在 0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
−2 m/s附近变化。 ⴞḷ䙏ᓖ/(mSs -1 ) 4 2 0 X. ⊲
ඵࣱவͯ/(°) -10 0 0 5 10 15 20 25 -2 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Y . ֓⊲
10
-4
0.2
ᄬಖᡰሏ/m 2000 ࣝЯणϠረ/s -0.2 0 X. ⊲
1500
Y . ⊲
1000
500
0.5
1.0
1.5
2.0
25
5
10
20
15
0
ᫎ/s 2.5 3.0 3.5
4
ⴞḷ䙏ᓖ/ (mSs -1 ) -2 2 0 (a) ኄ 0 ping
-4
0 5 10 15 20 25 4 X. ⊲
Y . ⊲
ڀฉऀՂ ॆʷӑࣨए 2 Ѽѿ᫃ᬍ
图 6 所有 ping 数据目标信息估计 0
0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
Fig. 6 Estimation results of target parameters for 4
all ping data 2 0 X. ⊲
Y . ֓⊲
分别选取第0 ping 和第 23 ping 数据进行处理, ⴞḷ䙏ᓖ/(mSs -1 ) -2
计算得到第 0 ping 目标回波信噪比约 4.5 dB,第 -4 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
23 ping目标回波信噪比约2.6 dB。每窗数据处理结 0.2
果如图7所示,将目标出现数据窗的FrFT结果转换 ࣝЯणϠረ/s 0.1 0 X. ⊲
为模糊图的形式,如图8所示。图7(a)显示第0 ping -0.1 Y . ⊲
数据中第 20、第 21 和第 22 窗数据处理结果超过判 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
ᫎ/s
别门限,第 21 窗数据完全覆盖目标回波,归一化结 (b) ኄ 23 ping
果最大。图 7(b) 显示第 23 ping 数据中第 12、第 13 图 7 每窗数据处理结果
和第 14 窗数据处理结果超过判别门限,第 13 窗数 Fig. 7 Processig results for data of each window
表 3 处理湖试数据得到的目标信息
Table 3 Target parameters obtained by processing experimental data
第 0 ping 数据 第 23 ping 数据
目标信息估计
第 20 窗 第 21 窗 第 22 窗 第 12 窗 第 13 窗 第 14 窗
目标回波时延/s 2.3876 2.3859 2.3853 1.4642 1.4635 1.4653
目标距离/m 1790.7 1789.4 1789.0 1098.1 1097.6 1099.0
目标速度/(m·s −1 ) −1.2 −2.1 −2.5 −1.8 −2.2 −1.3
目标方位 (−7 , 0 ) (−7 , 0 ) (−7 , 0 ) (0 , 0 ) (0 , 0 ) (0 , 0 )
◦
◦
◦
◦
◦
◦
◦
◦
◦
◦
◦
◦