
Page 108 - 《应用声学》2020年第2期
P. 108
266 2020 年 3 月
5 X: 0.05605 4 X: 0.0656
ᖂаॆᑵᓖ Y : 4.27 ᖂаॆᑵᓖ 2 Y : 3.557
0 0
0 0.05 0.10 0 0.05 0.10
4 4 4 4
Time=2.3298 s 4 Time=1.3979 s
3
2 2 3 2 2
0 0 0 0 2
X: -2.1 ⴞḷ䙏ᓖ/(mSs -1 ) 2 X: -2.2 ⴞḷ䙏ᓖ/(mSs -1 )
Y : 4.27 Y : 3.557
-2 -2 ⴞḷ 1 -2 -2 ⴞḷ 1
-4 -4 -4 -4
4.5 4.0 3.5 3.0 0 0.05 0.10 4.0 3.5 3.0 2.5 0 0.05 0.10
ᖂаॆᑵᓖ ᰦ䰤/s ᖂаॆᑵᓖ ᰦ䰤/s
(a) ኄ 0 ping (b) ኄ 23 ping
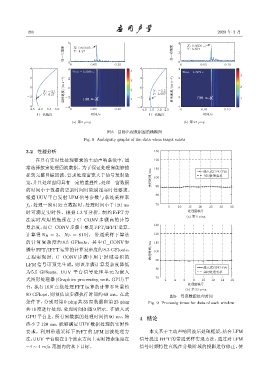
图 8 目标出现数据窗的模糊图
Fig. 8 Ambiguity graphs of the data when target exists
3.2 性能分析 130
在具有实时性处理要求的主动声呐系统中,通 120
常选择按窗处理回波数据。为了保证处理窗能够捕 110
捉到完整目标回波,要求处理窗宽大于信号发射脉 ੰᛡᫎ/ms 100 ࢦКरGPUࣱԼ
ࠄܫေ᜶ර
宽,并且处理窗间具有一定的重叠性。处理一窗数据 90
的时间小于数据的更新时间时能满足实时性要求。
80
根据 UUV 平台发射 LFM 信号参数与系统采样率
f s ,处理一窗 8192 点数据时,处理时间小于 120 ms 70
5 10 15 20 25 30 35
时可满足实时性。根据 1.3 节分析,制约 FrFT 方 ܫေቔᎄՂ
(a) ኄ 0 ping
法实时应用的瓶颈在于 C_CONV 步骤高的计算
130
复杂度,而C_CONV步骤主要是 FFT/IFFT运算。
计算得 N B = 3、 N P = 81 时, 带通采样下算法 120
的计算复杂度约 8.5 GFloats,其中 C_CONV 步 110
骤中 FFT/IFFT 运算的计算复杂度约 8.3 GFloats。 ੰᛡᫎ/ms 100
工程实现时,C_CONV 步骤中用于时域卷积的
90
LFM 信号可预先生成,则该步骤计算复杂度降低
80 ࢦКरGPUࣱԼ
为 5.5 GFloats。UUV 平台信号处理单元为嵌入 ࠄܫေ᜶ර
式图形处理器 (Graphics processing unit,GPU) 平 70 2 4 6 8 10 12 14 16
ܫေቔᎄՂ
台,执行 16N 点批处理 FFT 运算的计算吞吐量约
(b) ኄ 23 ping
80 GFlops,则预估该步骤执行时间约 69 ms。在此
图 9 每窗数据处理时间
条件下,分别对第 0 ping 共 35 窗数据和第 23 ping Fig. 9 Processig times for data of each window
共 16 窗进行处理,处理时间如图 9 所示。在嵌入式
GPU 平台上,所有窗数据的处理时间约 90 ms,始 4 结论
终小于 120 ms,能够满足 UUV 数据处理的实时性
要求。利用带通采样下 FrFT 的 LFM 回波处理方 本文基于主动声呐回波后处理框架,结合LFM
法,UUV 平台能在3 个波束方向上实时搜索速度在 信号提出 FrFT 的带通采样实现方法,通过对 LFM
−4 ∼ 4 m/s 范围内的水下目标。 信号时频特性直线在分数阶域的投影进行修正,使