
Page 150 - 《应用声学》2020年第2期
P. 150
308 2020 年 3 月
料的声发射信号频率一般都在 100 kHz∼1 MHz 之 其中,ε 0 为相对介电常数,A 为传感单元上极板面
间 [9] ,并能产生瞬态的复杂信号。由于较高频率的 积,x(t)表示电容层的相对位移,g 为极板间的间隙。
快速衰减特性,本文设计传感器的谐振频率控制在 假设弹簧元件连接到上极板的节点 (图 3 中的
100 kHz∼500 kHz。 节点 c) 没有旋转,可得节点 c 在 z 方向上的偏转位
i↼t↽ 移方程为
( 3 2 3 )
L S1 L L S2 L S2
S1
∆ c = F + +
3
3EI βb s h G 3EI
V DC s
x↼t↽ 2
u↼t↽ L S1 + L S1 L S2
3
2EI βb S h G
− F S
L S1 L S2
+
3
EI βb S h G
S
( 2 )
L L S1 L S2
× S1 + 3 , (2)
图 2 微型谐振式电容传感单元的基本结构和工作 2EI βb S h G
S
机理
其中,F 为施加在 c 点的力,E 为拉伸弹性模量,G
Fig. 2 Basic structure and working mechanism of
为剪切弹性模量,I 为惯性矩,L S1 、L S2 为弹簧的长
miniature resonant capacitive sensing unit
度,b S 、h S 分别为弹簧截面的长和宽,β 是与截面长
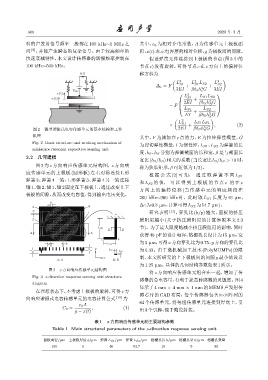
2.2 几何建模
宽比 (b S /h S )相关的系数 (当长宽比 b S /h S > 10时,
图 3 为 z 方向响应传感单元结构图,z 方向响 称为狭长矩形,β 可近似为1/3)。
应传感单元的上极板 (圆形板) 左右对称连接 L 形
根 据 公 式 (2) 可 知, 通 过 取 弹 簧 不 同 L S1
弹簧 3、弹簧 4 一端,L 形弹簧 3、弹簧 4 另一端连接
和 L S2 的 值, 可 以 得 到 上 极 板 的 节 点 c 的 在 z
锚 1、锚2,锚1、锚2 固定在下极板上,通过改变上下
方向上的偏转位移 (当传感单元的响应频段在
极板的间隙,从而改变电容值,得到输出电压变化。
200 kHz∼300 kHz 时,此时取 L S1 长度为 46 µm,
h ∆c为0.3 µm,计算可得L S2 为54.7 µm)。
n [11]
研究表明 ,穿孔比 (h/p) 越大,圆板的挤压
a
膜阻尼越小 (关于挤压膜阻尼的计算参照本文 2.3
节)。为了最大限度地减小挤压膜阻尼的影响,同时
L S
B B
A A
获得 40 pF的设计电容,格栅孔长设计为 15 µm,宽
c b
p b L S 为5 µm,可得 x方向穿孔比为0.75,y 方向的穿孔比
a y 为 0.33。由于微机械加工技术 (PolyMUMPs) 的限
g h S b S
x 制,本文所研究的上下极板间的间隙 g 最小值设置
A-A B-B
为1.25 µm。具体的几何结构参数如表1所示。
图 3 z 方向响应传感单元结构图
将 z 方向响应传感单元组合在一起,增加了传
Fig. 3 z-direction response sensing unit structure
感器的总电容量,有利于提高传感器的灵敏度。图 4
diagram
显示了4 mm × 4 mm × 1 mm的MEMS声发射传
在理想状态下,不考虑上极板的旋转,可得z 方
感芯片的 CAD 布局,每个传感器包含 8×8 阵列的
向响应谐振式电容传感单元的电容计算公式 [10] 为
64 个传感单元,将每组传感单元连接到焊盘上,引
ε 0 A
C 0 = , (1) 出3个引脚,便于陶瓷封装。
g − x(t)
表 1 z 方向响应传感单元的主要结构参数
Table 1 Main structural parameters of the z-direction response sensing unit
圆板直径/µm 上极板厚度 a/µm 弹簧 L S1 /µm 弹簧 L S2 /µm 格栅孔长 h/µm 格栅孔宽 n/µm 格栅孔数量
100 4 46 54.7 15 5 89