
Page 154 - 《应用声学》2020年第2期
P. 154
312 2020 年 3 月
V ⇁ 元。本研究中,保持 U 形弹簧刚度不变,通过改
12
ł Ń
14
变 x 方向响应传感单元在 z 方向上的极板厚度,可
16 G
17 以得到 4 个不同响应频段的传感单元。将传感器
G
响应频率范围 100 kHz ∼ 500 kHz 分为 4 个响应
18
y
15 频段 (100 kHz ∼ 200 kHz、200 kHz ∼ 300 kHz、
13
x 300 kHz ∼ 400 kHz、400 kHz ∼ 500 kHz),不同响
应频段分别对应于具有不同极板厚度的 x 方向响
V ֓
应传感单元,所对应的极板厚度为 140 µm、60 µm、
图 10 y 方向响应传感单元
30 µm、15 µm。为便于研究,选取响应频段在
Fig. 10 y-direction response sensing unit
200 kHz ∼ 300 kHz、z 方向极板厚度为 60 µm 的传
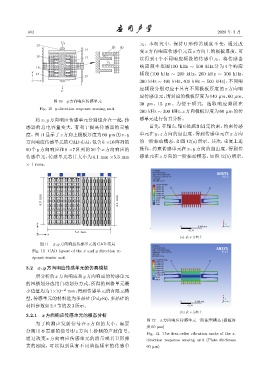
将 x、y 方向响应传感单元分别组合在一起,传 感单元进行仿真分析。
感器的总电容量变大,有利于提高传感器的灵敏 首先,在锚 5、锚 6 处施加固定约束,约束传感
度。图11 显示了 z 方向上极板厚度为 60 µm 的x、y 单元在 y、z 方向的自由度,得到传感单元在 x 方向
方向响应传感单元的CAD布局,包含6 ×10阵列的 的一阶振动模态,如图 12(a) 所示。其次,重复上述
60 个 y 方向响应和 8 ×7 阵列的 56 个 x 方向响应的 操作,约束传感单元在 x、y 方向的自由度,得到传
传感单元,传感单元芯片大小为 4.1 mm ×5.3 mm 感单元在 z 方向的一阶振动模态,如图 12(b) 所示。
× 1 mm。
A: Modal
Total deformation
Type: Total deformation
Frequency: 2.405×10 5 Hz
Unit: mm
2019/8/15 21:53
3.6323×10 5 Max
3.2287×10 5 5 6
2.8252×10 5
2.4216×10 5
2.0180×10 5
4.0 mm 4.1 mm 1.2108×10 5
1.6144×10 5
80719
40359
0 Min
x
y
0 0.300 mm z y
0.150
5.3 mm
x
(a) ښ x வՔʽ
图 11 x、y 方向响应传感单元的 CAD 布局
A: Modal
Total deformation
Fig. 11 CAD layout of the x and y direction re- Type: Total deformation
Frequency: 1.4673×10 5 Hz
Unit: mm
sponse sensor unit 2019/8/15 21:56
6.8528×10 5 Max 5 6
6.0914×10 5
5.3300×10 5
3.2 x、y 方向响应传感单元的仿真模拟 4.5685×10 5
3.8071×10 5
3.0457×10 5
2.2843×10 5
所分析的 x 方向响应和 y 方向响应的传感单元 1.5228×10 5
76142
0 Min
的网格划分选用自动划分方式,所得的网格单元最
小边值均为1×10 −2 mm,得到传感单元的有限元模
x
型,传感单元的材料选为多晶硅 (PolySi),多晶硅的
0 0.300 mm y
z
材料参数如2.4节的表3所示。 0.150
(b) ښ z வՔʽ
3.2.1 x方向响应传感单元的模态分析
图 12 x 方向响应传感单元一阶振型模态 (极板厚
为了检测声发射信号在 x 方向的大小,需要
度 60 µm)
分离出不需要的信号即 z 方向上检测的声波信号。
Fig. 12 The first-order vibration mode of the x-
通过改变 x 方向响应传感单元的质量或者 U 形弹 direction response sensing unit (Plate thickness
簧的刚度,可以得到具有不同谐振频率的传感单 60 µm)