
Page 155 - 《应用声学》2020年第2期
P. 155
第 39 卷 第 2 期 张礼华等: 三维微机电系统声发射传感器设计及性能分析 313
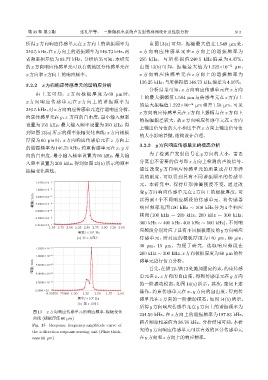
所得 x 方向响应传感单元在 x 方向上的谐振频率为 由图 13(a) 可知,振幅最大值在 1.549 µm 处,
240.5 kHz,在z 方向上的谐振频率为146.73 kHz,两 x 方向响应传感单元在 x 方向上的谐振频率为
者频率相差值为 93.77 kHz。分析结果可知,本研究 255 kHz, 与 所 模 拟 值 240.5 kHz 偏 差 为 4.37%。
的x方向响应传感单元可以有效地区分传感单元在 由图 13(b) 可知,振幅最大值为 1.222×10 −2 µm,
x方向和z 方向上的响应频率。 x 方向响应传感单元在 z 方向上的谐振频率为
136.25 kHz,与所模拟值146.73 kHz偏差为4.16%。
3.2.2 x方向响应传感单元的谐响应分析
分析结果可知,x 方向响应传感单元在 x 方向
由 上 文 可 知,z 方 向 极 板 厚 度 为 60 µm 时,
上的最大振幅值 1.594 µm 与传感单元在 z 方向上
x 方向响应传感单元在 x 方向上的谐振频率为
的最大振幅值 1.222×10 −2 µm 相差 1.58 µm,可见
240.5 kHz,对x方向响应传感单元进行谐响应分析,
x 方向响应传感单元在 z 方向上振幅与在 x 方向上
约束传感单元在 y、z 方向的自由度,最小输入频率
的振幅相差较大,故 x 方向响应传感单元在 z 方向
设置为 150 kHz,最大输入频率设置为 350 kHz,得
上输出信号值的大小相比于在x 方向上输出信号值
到如图 13(a) 所示的频率振幅变化曲线;z 方向极板
的大小影响甚微,结构设计合理。
厚度为 60 µm 时,x 方向响应传感单元在 z 方向上
3.2.3 y 方向响应传感单元的模态分析
的谐振频率为 146.73 kHz,约束传感单元在 x、y 方
向的自由度,最小输入频率设置为 50 kHz,最大输 为了检测声发射信号在 y 方向的大小,需要
入频率设置为 200 kHz,得到如图13(b)所示的频率 分离出不需要的信号即 z 方向上检测的声波信号。
振幅变化曲线。 通过改变 y 方向响应传感单元的质量或者 U 形弹
簧的刚度,可以得到具有不同谐振频率的传感单
1.5478T10 -3
元。本研究中,保持 U 形弹簧刚度不变,通过改
1.2500T10 -3
变 y 方向响应传感单元在 z 方向上的极板厚度,可
ࣨϙ/mm 1.0000T10 -3 以得到 4 个不同响应频段的传感单元。将传感器
7.5000T10 -4
5.0000T10 -4 响应频率范围 100 kHz ∼ 500 kHz 分为 4 个响应
频段 (100 kHz ∼ 200 kHz、200 kHz ∼ 300 kHz、
2.5000T10 -4
300 kHz ∼ 400 kHz、400 kHz ∼ 500 kHz),不同响
5.9196T10 -7
1.55 1.75 2.00 2.25 2.50 2.75 3.00 3.25 3.50
5
ᮠဋ/T10 Hz 应频段分别对应于具有不同极板厚度的y 方向响应
(a) ښ x வՔʽ 传感单元,所对应的极板厚度为 140 µm、60 µm、
30 µm、15 µm。为便于研究,选取响应频段在
1.2223T10 -5
200 kHz ∼ 300 kHz、z 方向极板厚度为 60 µm 的传
1.0000T10 -5 感单元进行仿真分析。
ࣨϙ/mm 7.5000T10 -6 首先,在锚12、锚13处施加固定约束,约束传感
5.0000T10 -6
单元在 x、z 方向的自由度,得到传感单元在 y 方向
2.5000T10 -6 的一阶振动模态,如图 14(a) 所示。其次,重复上述
2.2480T10 -10 操作,约束传感单元在 x、y 方向的自由度,得到传
0.53750 75000 1.00 1.25 1.50 1.75 2.00
5
ᮠဋ/T10 Hz 感单元在 z 方向的一阶振动模态,如图 14(b) 所示。
(b) ښ z வՔʽ
所得 y 方向响应传感单元在 y 方向上的谐振频率为
图 13 x 方向响应传感单元的响应频率 -振幅变化
234.59 kHz,在 z 方向上的谐振频率为 197.83 kHz,
曲线 (极板厚度 60 µm)
两者频率相差值为 36.76 kHz。分析结果可知,本研
Fig. 13 Response frequency-amplitude curve of
究的 y 方向响应传感单元可以有效的区分传感单元
the x-direction response sensing unit (Plate thick-
ness 60 µm) 在y 方向和z 方向上的响应频率。