
Page 80 - 《应用声学》2020年第2期
P. 80
238 2020 年 3 月
且始终保持静止状态。那么相应的水下接收声场由 场。为便于与第 4 节中实验数据的多普勒频移进行
式(1)给出 [4] : 对比,此处选取与实验相同的声源参数。两种环境
下均设置声源高度为 93 m,速度 49 m/s,声源频率
p (x, y, z, t)
∫ +∞ 为8.56×10 −3 (由于实验中运动声源频率的敏感性,
1 −jΩ 0 t jk x (x−v s t)
= e dk x e 因此文中用归一化后的频率值代替)。深海环境设
2π
−∞
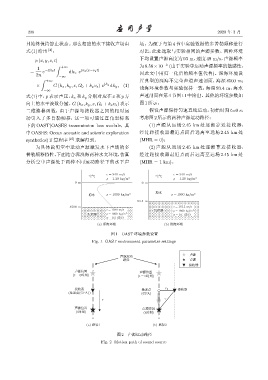
∫ 置典型的深海不完全声道声速剖面,海深 4500 m;
+∞
× G (k x , k y , z, Ω 0 + k x v s ) e jk y dk y , (1)
浅海环境参数与实验保持一致,海深 93.4 m,海水
−∞
式 (1) 中,p 表示声压,k x 和 k y 分别对应在 x 和 y 方 声速剖面在第4节图11中给出。其他的环境参数如
向上的水平波数分量。G (k x , k y , z, Ω 0 + k x v s )表示 图1所示。
二维格林函数,由于声源与接收器之间的相对运 假设声源保持匀速直线运动,初始时刻 t=0 s,
动引入了多普勒频移,这一项可通过直角坐标系 考虑图2所示的两种声源运动路径:
下的 OAST(OASES transmission loss module,其 (1) 声源从远场 2.45 km 处逐渐靠近接收器,
中OASES: Ocean acoustic and seismic exploration 经过距接收器最近点而后远离至远场 2.45 km 处
synthetics)计算程序 [15] 求解得到。 (MHR = 0);
为具体说明空中运动声源激发水下声场的多 (2) 声源从远场 2.45 km 处逐渐靠近接收器,
普勒频移特性,下面结合深浅海两种水文环境,仿真 经过距接收器最近点而后远离至远场 2.45 km 处
分析空中声源处于两种不同运动路径下的水下声 (MHR = 1 km)。
c=340 m/s c=340 m/s
ቇඡ ቇඡ
ρ=1.29 kg/m 3 ρ=1.29 kg/m 3
0 m 0 m
๒ඵ
๒ඵ ρ=1000 kg/m 3 ρ=1000 kg/m 3
93.4 m
4500 m c=1611 m/s
c=1580 m/s ොሥࡏ ρ=1800 kg/m 3
ොሥࡏ ρ=1600 kg/m 3 α=0.1 dB/λ
α=0.2 dB/λ
(a) ງ๒ဗܒ (b) ู๒ဗܒ
图 1 OAST 环境参数设置
Fig. 1 OAST environment parameter settings
ܦູ
ܦູᤂү
य़ ܦູ
ଌஆ٨
ܦູͯᎶ ܦູͯᎶ
↼t/҉↽ (t=0҉)
ଌஆ٨ తᤃག r 0 ଌஆ٨
(తᤃག(CPA)) (CPA)
r r
ܦູͯᎶ ܦູͯᎶ
↼t҉↽ ↼t҉↽
(a) य़1 (b) य़2
图 2 声源运动路径
Fig. 2 Motion path of sound source