
Page 85 - 《应用声学》2020年第2期
P. 85
第 39 卷 第 2 期 刘凯悦等: 水下对空中声源的运动参数估计 243
器获取空中运动声源在不同时刻处的方位信息,累 ᑟ᧚៨/dB
0
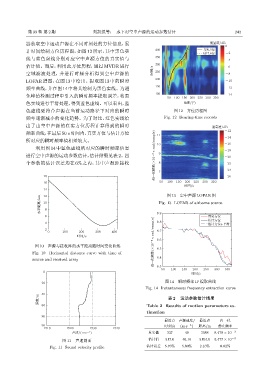
计时间绘制方位历程图,如图 12 所示,其中黑色实 400 ᄾࠄவͯ -2
ͥᝠவͯ
线与蓝色虚线分别对应空中声源方位的真实值与 350 -4
估计值。而后,利用此方位历程,通过 MVDR 进行 -6
250
空域滤波处理,并进行时频分析得到空中声源的 ᫎ/s 300 -8
LOFAR 谱图,在图 13 中给出。提取图 13 中的瞬时 200 -10
频率曲线,并在图 14 中将其绘制为黑色实线。为避 150 -12
免峰值检测过程中引入的瞬时频率提取误差,将黑 100 50 100 150 200 250 300 350 -14
色实线进行平滑处理,得到蓝色虚线。可以看出,蓝 ᝈए/(O)
色虚线更符合声源在当前运动路径下对应的瞬时 图 12 方位历程图
频率逐渐减小的变化趋势。为了对比,红色实线给 Fig. 12 Bearing-time records
出了由空中声源的真实方位历程计算得到的瞬时 ᑟ᧚៨/dB
ॆʷӑᮠဋ(T10 -3 p rad/sample) -20
频率曲线,在最后50 s时间内,真实方位与估计方位 11 -12
所对应的瞬时频率值相差较大。 -14
-16
利用图 14 中蓝色虚线所对应的瞬时频率信息 10 -18
进行空中声源的运动参数估计,估计结果见表2。四 9
个参数的估计误差均在 6% 之内,其中声源距接收 8 -22
18 7 -24
-26
16 50 100 150 200 250 300 350
ᫎ/s
14 图 13 空中声源 LOFAR 图
12
ඵࣱᡰሏ/km 10 8 Fig. 13 LOFAR of airborne source
6 8.9 ᄾࠄவͯ
ॆʷӑᮠဋ(T10 -3 p rad/sample) 8.6
4 8.8 ͥᝠவͯ
ͥᝠவͯ+ࣱ
2
0 100 200 300 400 8.7
ᫎ/s
图 10 声源与接收阵的水平距离随时间变化曲线 8.5
Fig. 10 Horizontal distance curve with time of
source and received array 8.4
8.3
50 100 150 200 250 300 350
0
ᫎ/s
20 图 14 瞬时频率 IF 提取曲线
Fig. 14 Instantaneous frequency extraction curve
40
ງए/m 60 Table 2 Results of motion parameters es-
运动参数估计结果
表 2
timation
80
最近点 声源速度/ 最近点 归一化
96 时刻/s (m·s −1 ) 距离/m 静止频率
1510 1520 1530 1540
ܦᤴ/(mSs -1 ) 真实值 337 49 3088 8.478 × 10 −3
图 11 声速剖面 估计值 317.6 46.16 3154.6 8.477 × 10 −3
Fig. 11 Sound velocity profile 估计误差 5.76% 5.80% 2.16% 0.02%