
Page 74 - 《应用声学》2022年第5期
P. 74
750 2022 年 9 月
上述研究在应用盲反卷积技术时,部分与所选
0 引言 波束相干性较低的路径提取效果欠佳,使得提取出
的格林函数图像存在明显的模糊,直接影响到阵不
被动声源定位问题一直是海洋声学研究的热
变量方法的定位精度。
点,常见的被动定位方法有三点定位、匹配场方法、
针对上述问题,本文提出基于交替投影 (Alter-
波导不变量 [1−2] 、阵不变量法等。
nating projection, AP) [8−9] 盲反卷积的阵不变量定
阵不变量定位技术作为一种水声信号处理技
位方法。该方法利用AP方法分离出多径信号,对多
术,近几年受到了广泛关注。与基于模型的匹配场
个波束分别进行盲反卷积,并将不同波束提取出的
定位方法相比较,利用阵不变量的被动定位方法不
格林函数相干联合起来,最后通过盲反卷积技术与
需要海洋环境的准确知识,可以几乎实时地进行目
阵不变量方法的级联实现被动定位。通过仿真实验
标的定位和跟踪,是一种具有鲁棒性和高效性的定
结果验证了该方法在低信噪比条件下实时被动定
位方法。
位的能力,证明了 AP 盲反卷积技术有效解决了低
Lee 等 [3] 在 2006 年提出了利用阵不变量的定
信噪比下格林函数图像模糊的问题,从而使阵不变
位方法,该方法能够利用声源辐射信号多条入射路
量方法的定位精度显著提高。
径的入射角度随时间偏移的伪彩图来解算声源的
距离信息。但由于利用阵不变量的方法进行定位需 1 基于AP盲反卷积的阵不变量方法
要确保在波束域和时域中的多径到达相互分离,因
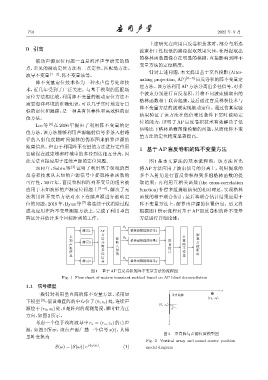
此无法直接应用于连续声源的定位问题。 图 1 是本文算法的基本流程图。该方法首先
2010 年,Sabra 等 [4] 证明了利用基于射线的盲 将 AP 方法应用于波束信号的分离上,利用提取的
反卷积技术从未知的声源信号中提取格林函数的 多个入射角进行盲反卷积得到多组格林函数的提
可行性。2017 年,盲反卷积和阵列不变量的组合被 取结果;再利用互相关函数 (the cross-correlation
应用于未知波形的声源定位问题上 [5−6] ,解决了无 function) 补偿多组提取结果的相对时延,实现格林
法利用阵不变量方法对水下连续声源进行被动定 函数的相干联合估计;最后将联合估计结果应用于
位的问题。2019年,Byun等 [7] 将连续干扰消除过程 阵不变量方法上,解算出声源的位置信息。后文将
成功应用在阵不变量测距方法上,完成了利用垂直 根据图 1 所示流程对基于 AP 盲反卷积的阵不变量
阵区分并估计多个目标距离的工作。 方法进行详细论述。
θ
Ћ1 AP ಫѦଢԩፇ౧1
வ ᝍ
ళ ข ଢ θ ᝠ ካ
ᅼ Ћ2 Ѭ ԩ ಫѦଢԩፇ౧2 ᐏ ካ ᄬ
ܦ Ռ
ູ ሏ К ͥ ˀ ಖ
࠱
ᡰ
ܳ
η य़ ᝈ ᝠ ԫ
ৌ ᧚ ሏ
η θ q
Ћ3 Ղ ಫѦଢԩፇ౧q
图 1 基于 AP 盲反卷积的阵不变量方法的流程图
Fig. 1 Flow chart of matrix invariant method based on AP blind deconvolution
1.1 信号模型
r
一般针对利用垂直阵的阵不变量方法,采用如 ⴤ㓯䱥
↼r ֒ z ↽
下模型 [3] :假设垂直阵的中心位于(0, z c )处,连续声
↼֒ z c↽
源位于(r 0 , z 0 )处,θ 是阵列的观测角度,顺时针为正 θ
方向,如图2所示。
考虑一个位于浅海波导中 r s = (r s , z s ) 的点声 z
源,如图 2 所示,该点声源广播一个信号 s(t),其傅
图 2 垂直阵与声源位置模型图
里叶变换为
Fig. 2 Vertical array and sound source position
S(ω) = |S(ω)| e iϕ s (ω) . (1) model diagram