
Page 62 - 《应用声学》2022年第6期
P. 62
908 2022 年 11 月
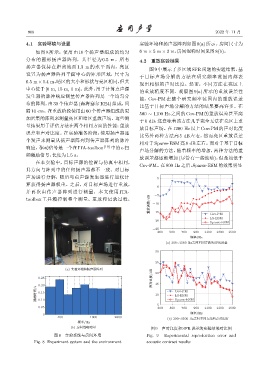
4.1 实验环境与设置 实验环境和扬声器阵列如图8(a)所示。房间尺寸为
如图 8 所示,使用由 16 个扬声器组成的均匀 6 m × 5 m × 3 m,房间混响时间见图8(b)。
分布的圆形扬声器阵列,其半径为 0.5 m。所有 4.2 重放实验结果
扬声器保持在距离地面 1.3 m 的水平面内,亮区
图 9 中展示了多区域 SFR 问题的实验结果,基
设置为扬声器阵列平面中心的矩形区域,尺寸为
于目标声场分解的方法在研究频率范围内都表
0.5 m × 0.4 m,暗区的大小和形状与亮区相同,但其
现出相似的声对比度。然而,不同方法在亮区上
中心位于 [0 m, 15 m, 0 m]。此外,用于计算点声源
的重放精度不同。观察图 9(a) 所示的重放误差性
发生器的脉冲响应测量传声器阵列是一个均匀分
能,Cov-PM 在整个研究频率范围内的重放误差
布的阵列,由 30 个传声器 (森海塞尔 KE4) 组成,间
比基于目标声场分解的方法的结果要高许多。在
隔10 cm。在重放阶段使用由60个传声器组成的更
500 ∼ 1100 Hz 之间的 Cov-PM 的重放误差甚至高
加密集的阵列来测量亮区和暗区重放声场。这些测
于0 dB,这意味着该方法几乎完全无法在亮区上重
量结果用于评估方法在两个相同方面的性能:重放
放目标声场。在 1200 Hz 以上 Cov-PM 的声对比度
误差和声对比度。在实验准备阶段,使用扬声器逐
比另外两种方法高 5 dB 左右,然而亮区重放误差
个发声来测量从扬声器阵列到传声器阵列的脉冲
相对于Sparse-ESM 高8 dB 左右。而对于基于目标
响应。驱动信号是一个在 ITA-toolbox [19] 中的e-扫
声场分解的方法,随着频率的增加,两种方法的重
频激励信号,长度为1.5 s。
放误差都逐渐增加 (尽管有一些波动),但是均低于
在本实验中,目标声源的位置与仿真中相同,
Cov-PM。在800 Hz之后,Sparse-ESM的效果明显
其方向与阵列中的任何扬声器都不一致。对目标
声场进行分解,随后与点声源发生器进行加权计 5
算获得扬声器权重。之后,对目标声场进行重放,
0
并再次由传声器阵列进行测量。本文使用 ITA- -5
᧘ஊឨࣀ/dB -10
toolbox 工具箱控制整个测量、重放和记录过程。
-15
Cov-PM
LS-ESM
-20
Sparse-ESM
-25
300 500 700 900 1100 1300 1500
ᮠဋ/Hz
(a) 300~1500 Hz˨ᫎˀՏவขᄊSFRឨࣀ
30
25
(a) ࠄᰎဗܒ֗ੴܦ٨ѵ 20
ܦࠫඋए/dB 15
0.25
ຉ־ᫎ/s 0.20 10 Cov-PM
0.15
LS-ESM
0.10
5 Sparse-ESM
0.05 300 500 700 900 1100 1300 1500
0 ᮠဋ/Hz
400 1000 2000
(b) 300~1500 Hz˨ᫎˀՏவขᄊܦࠫඋए
ᮠဋ/Hz
(b) ᫎຉ־ᫎ 图 9 声对比度和 SFR 误差的实验结果对比图
图 8 实验系统与房间环境 Fig. 9 Experimental reproduction error and
Fig. 8 Experiment system and the environment acoustic contrast results