
Page 14 - 《应用声学》2023年第3期
P. 14
452 2023 年 5 月
11 6
10 5 Cs-BO-EKF
BO-EKF
9 4
ܦᤴ/(mSs -1 ) 8 7 ᤴएͥᝠᄱࠫឨࣀ/(mSs -1 ) 3
6 Cs-BO-EKF 2
BO-EKF
ᄾࠄϙ
5 1
4 0
0 10 20 30 40 50 0 10 20 30 40 50
ᫎ/min ᫎ/min
(a) ᄬಖᤴएᡲᢎజጳ (b) ᄬಖᤴएᡲᢎឨࣀజጳ
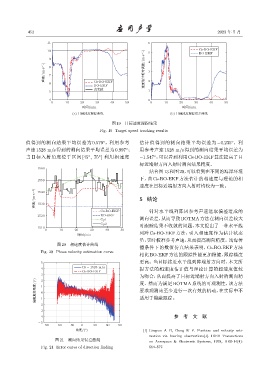
图 19 目标速度跟踪结果
Fig. 19 Target speed tracking results
值得到的测向结果平均误差为 0.579 ,利用参考 估计值得到的测向结果平均误差为 −0.235 ,利
◦
◦
声速 1528 m/s 得到的测向结果平均误差为 0.997 ; 用参考声速 1528 m/s 得到的测向结果平均误差为
◦
当目标入射角度位于区间 [45 , 75 ] 利用相速度 −1.547 ,可以看到利用 Cs-BO-EKF 算法提高了目
◦
◦
◦
标近端射方向入射时测向结果精度。
1560
结合图13和图20,可以看到在不同的海洋环境
下,由 Cs-BO-EKF 方法估计的相速度与理论的相
1550
速度在目标近端射方向入射时均较为一致。
ܦᤴ/(mSs -1 ) 1530 5 结论
1540
Cs-BO-EKF 针对水平线列阵因参考声速选取偏差造成的
1520 BO-EKF
Cp1 测向误差,从而导致 BOTMA 方法在测向误差较大
Cp2
1510 时跟踪结果不收敛的问题,本文提出了一种水平线
0 10 20 30 40 50
列阵 Cs-BO-EKF 方法,引入相速度作为估计状态
ᫎ/min
量,实时校准参考声速,从而提高测向精度。浅海传
图 20 相速度估计曲线
播条件下的数值仿真结果表明,Cs-BO-EKF 方法
Fig. 20 Phase velocity estimation curve
相比 BO-EKF 方法的跟踪性能更加稳健,跟踪精度
5 更高。当目标接近水平线列阵端射方向时,本文所
Cs=1528 m/s
4 提方法的相速度估计值与理论计算的相速度值较
Cs-BO-EKF
3
为吻合,从而提高了目标近端射方向入射的测向精
Ϡሏᄾࠄᝈए/(°) 1 0 要求观测站至少进行一次有效的机动,在实际中不
2
度。然而为满足 BOTMA 系统的可观测性,该方法
适用于隐蔽跟踪。
-1
-2
-3
-4 参 考 文 献
-5
-90 -60 -30 0 30 60 90
ᝈए/(°) [1] Lingren A G, Gong K F. Position and velocity esti-
mation via bearing observations[J]. IEEE Transactions
图 21 测向结果误差曲线 on Aerospace & Electronic Systems, 1978, AES-14(4):
Fig. 21 Error curve of direction finding 564–577.