
Page 110 - 《应用声学》2023年第6期
P. 110
1220 2023 年 11 月
现有的多项式结构宽带波束形成器设计中,多 式(13) 中DI(ψ |ψ i ), i = 0, · · · , I − 1 表示将 ψ i (i =
项式插值点的位置选择往往都是均匀分布的,插值 0, · · · , I − 1) 作为波束形成器插值点而计算得到的
点位置的自由度没有得到充分利用,忽视了插值点 DI。
位置的优化对提升波束形成器性能的贡献。为克服 3.3 优化问题的求解
这一缺点,在优化问题式 (12) 的基础上,进一步提
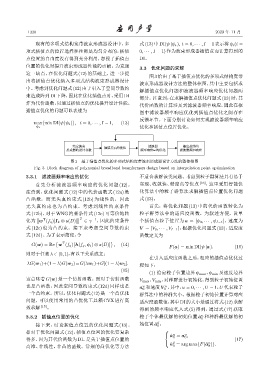
图3给出了基于插值点优化的多项式结构宽带
出将插值点优化纳入多项式结构波束形成器设计
波束形成器设计方法的整体框图,其中主要包括求
中。考虑到优化问题式(12)由于引入了空间导数约
解插值点优化问题和滤波器频率响应优化问题两
束造成阵列 DI 下降,因此在优化插值点时,采用 DI
部分。注意到,在求解插值点优化问题式(13)时,其
作为代价函数,以通过插值点的优化提升设计性能。
代价函数的计算涉及到滤波器频率响应,因此在框
插值点优化的问题可以表述为
图中滤波器频率响应优化到插值点优化之间存在
反馈环节。下面分别讨论如何实现滤波器频率响应
max [min DI(ψ |ψ i )] , i = 0, · · · , I − 1, (13)
优化和插值点位置优化。
ψ i
ፌࠀฉౌ ଣϙགψ i ᄊ͖ӑ ฉ٨ ᣥѣతጼᄊ
ॎੇ٨ᄊᝠԠ ᮠဋ־ऄwᄊ͖ӑ ฉ٨ᮠဋ־ऄ
图 3 基于插值点优化的多项式结构宽带波束形成器设计方法的整体框图
Fig. 3 Block diagram of polynomial broadband beamformers design based on interpolation point optimization
3.3.1 滤波器频率响应的优化 不适合求解该类问题。考虑到粒子群算法具有易于
首先分析滤波器频率响应的优化问题 (12)。 实现、收敛快、精度高等优点 [16] ,这里采用智能优
注意到,优化问题式 (12) 中的代价函数式 (12a) 是 化算法中的粒子群算法求解插值点位置优化问题
凸函数,而无失真约束式 (12b) 为线性的,因此 式 (13)。
无失真约束也为凸约束。考虑到线性约束条件 首先,将优化问题 (13) 中的代价函数转化为
式 (12b),对于 WNG 约束条件式 (12c) 可等价地转 粒子群算法中的适应度函数。为叙述方便,设单
T
2 −1
化为 w (f q )[I k ⊗ s(D)]
6 γ ,因此约束条件 个插值点粒子位置为 a = [ψ 0 , · · · , ψ I−1 ],速度为
式 (12c) 也为凸约束。接下来考虑空间导数约束 V = [V 0 , · · · , V I−1 ],根据优化问题式 (13),适应度
式 (12d)。为了表示简便,令 函数定义为
{ T }
G(w) = Re w (f q ) [h(f q , ψ i ) ⊗ s(D)] , (14)
F(a) = min DI(ψ |a). (16)
则对于任意λ ∈ [0, 1],有以下关系成立:
在引入适应度函数之后,相应的插值点优化过
λG(w 1 )+(1 − λ)G(w 2 )=G(λw 1 )+G[(1 − λ)w 2 ]. 程如下:
(15)
(1) 给定粒子位置边界 ψ max 、ψ min 及速度边界
这意味着 G(w) 是一个仿射函数。而对于仿射函数 V max 、V min ,对种群进行初始化,得到粒子初始位置
也是凸函数,因此空间导数约束式 (12d) 同样也是 a 和速度 V ,其中,u = 0, · · · , U − 1,U 代表粒子
u
u
0
0
一个凸约束。所以,优化问题式 (12) 是一个凸优化 群算法中的种群大小。根据粒子初始位置计算对应
问题,可以使用常用的凸优化工具箱 CVX 进行高 适应度函数值,其中DI的大小是通过将式(12)求解
效求解 [15] 。 得到的频率响应代入式 (5) 得到,通过式 (17) 获取
3.3.2 插值点位置的优化 粒子个体最优解的初始位置 ˆ a 和种群最优解的初
u
0
g
接下来,讨论插值点位置的优化问题式 (13)。 始位置 ˆ a :
0
相对于优化问题式 (12),插值点位置的优化要复杂
u
u
ˆ a = a ,
得多,因为其代价函数为 DI,是关于插值点位置的 0 0 (17)
g
u
ˆ a = arg max{F(ˆ a )}.
高维、非线性、非凸的函数。常规的凸优化等方法 0 0