
Page 111 - 《应用声学》2023年第6期
P. 111
第 42 卷 第 6 期 许志强等: 融合插值点优化的多项式结构宽带波束形成器设计方法 1221
u
(2) 更新粒子速度和位置: (3) 更新粒子个体最优解的位置 ˆ a 和种群最
k
g
[
V u = ωV u + c 1 r 1 ˆ a u − a u ] 优解的位置 ˆ a :
k
k k−1 k−1 k−1
[ g u ]
+ c 2 r 2 ˆ a − a , (18) u u u
k−1 k−1 u a , F(a ) > F(ˆ a k−1 ),
k
k
ˆ a = (20)
k u u u
u
u
a = a u + V , (19) ˆ a k−1 , F(a ) 6 F(ˆ a k−1 ).
k
k k−1 k
其中,k 为迭代次数,r 1 , r 2 ∈ (0, 1)范围内的随机数, g
u
ˆ a = arg max{F(ˆ a )}. (21)
k
u
参数 c 1 和 c 2 为学习因子,ω 为惯性权重,V 为第 k k
k
u
次迭代时粒子 u 的速度,a 是第 k 次迭代时粒子 u (4) 令k = k + 1,重复步骤(2)和步骤(3),直到
k
u
所对应的插值点位置, ˆ a 为第 k 次迭代时粒子 u 个 满足所设定的最大迭代次数,终止粒子更新,输出此
k
g
体最优解的位置, ˆ a 为第 k 次迭代时种群最优解的 时种群最优解的位置作为最终的优化插值点:
k
位置。需要注意的是,迭代后要根据 V max 、V min 和 g
a opt = ˆ a . (22)
ψ max 、ψ min 的值做边界处理,即判断粒子速度和位 k max
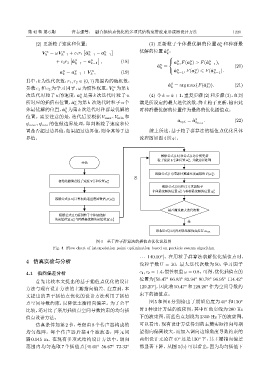
置是否超过边界值,如果超过边界值,则令其等于边 综上所述,基于粒子群算法的插值点优化具体
界值。 流程图如图4所示。
ಪНर(18)֗Нर(19)Ѭѿఞழ
u u
ዢߕᤴए V k ֗ͯᎶa k , ࣳϢႍܫေ
नݽ
u
ಪНर(16)᧘ழᝠካᤠऄएѦϙF↼a ↽
k
ա
u u
ѺݽӑଣϙགዢߕᤴएV ֗ͯᎶa 0
ಪНर(20)֗(21)ఞழዢߕ
u g
˔ʹత͖ᝍᄊͯᎶ ⌣ a k ˁመᏆత͖ᝍᄊͯᎶ ⌣ a k
u
ಪНर(16)ᝠካѺݽᤠऄएѦϙF↼a ↽
௧ա໘ᡜతܸᤖ̽
ಪНर(17)४҂ዢߕ˔ʹత͖ᝍ
u g
ᄊѺݽͯᎶ ⌣ a ˁመᏆత͖ᝍᄊѺݽͯᎶ ⌣ a ௧
ಪНर(22)४҂͖ӑଣϙགͯᎶ a opt
图 4 基于粒子群算法的插值点优化流程图
Fig. 4 Flow chart of interpolation point optimization based on particle swarm algorithm
· · · 140.00 ]。在用粒子群算法求解优化插值点时,
◦
4 仿真实验与分析
设粒子数 U = 30,最大迭代次数为 50,学习因子
4.1 指向偏差分析 c 1 , c 2 = 1.4,惯性权重ω = 0.8。可得,优化插值点的
位置为[50.47 66.83 82.94 90.78 96.95 114.42 ◦
◦
◦
◦
◦
◦
首先比较本文提出的基于插值点优化的设计
129.20 ],因此将 50.47 和 129.20 作为空间导数约
◦
◦
◦
方法与现有设计方法的主瓣指向偏差。注意到,本
文提出的基于插值点优化的设计方法利用了插值 束下的插值点。
◦
点空间导数约束,以降低主瓣指向偏差。为了公平 图 5 和图 6 分别给出了期望角度为 40 和 130 ◦
比较,还对比了采用插值点空间导数约束的均匀插 时 3 种设计方法的波束图,其中红色实线为 200 Hz
值点设计方法。 下的波束图,而蓝色点划线为 2300 Hz 下的波束图。
仿真条件如第 2 节,考虑由 8 个传声器构成的 可以看出,现有设计方法得到的主瓣实际指向与期
均匀线阵,每个传声器后接 4 个滤波器,阵元间 望指向偏离较大,而加入调向边缘角度导数约束的
隔 0.045 m。在现有多项式结构设计方法中,调向 两组设计无论在 40 还是 130 下,其主瓣指向偏差
◦
◦
范围内均匀选取 7 个插值点 [40.00 56.67 73.33 ◦ 都显著下降。从图 5(b) 可以看出,因为均匀插值下
◦
◦